
Medical nanorobots: Design, applications and future challenges
Following the current technological revolution, the concept of emerging fields and getting a common benefit becomes a bright way to follow. Going deeper in nanotechnology, nanorobotics has been the glimpse of hope in many fields; particularly, in the medical field. Nanorobotics applications in medicine are divided into two main categories, diagnosis and treatment, and extensive efforts have been given to research about its operation principles and design. Unfortunately, problem have emerged regarding the implementation, methods of actuation, and customized components of nanorobotics to be used
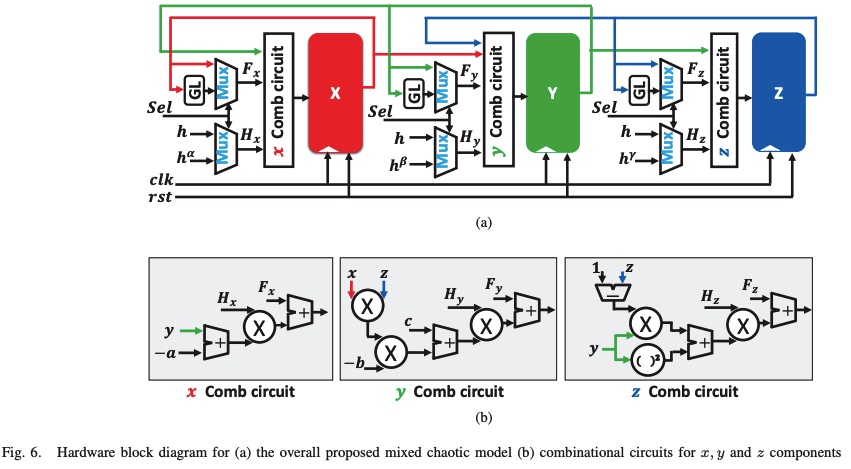
A Digital Hardware Implementation for A new Mixed-Order Nonlinear 3-D Chaotic System
This paper introduces a generic modeling for a 3-D nonlinear chaotic based on fractional-order mathematical rules. Also, a novel modeling for the system using a mixture between integer and fractional-order calculus is proposed. Dynamics of the new realization are illustrated using phase portrait diagrams with complex behavior. Also, a great change in the parameter ranges is investigated using bifurcation diagrams. MATLAB and Xilinx ISE 14.5 are used in system simulations. Furthermore, the digital hardware implementation is done using Xilinx FPGA Virtex-5 kit. The synthesis report shows that
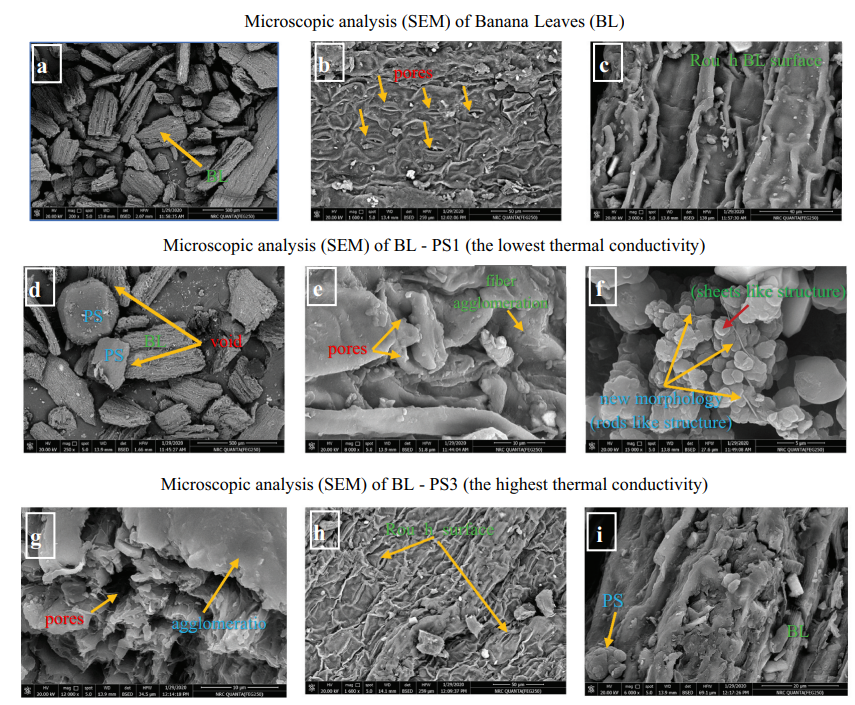
Bio-composite Thermal Insulation Materials Based on Banana Leaves Fibers and Polystyrene: Physical and Thermal Performance
Thermal insulators have a crucial role in reducing the operational building energy. They are commonly fabricated from petrochemical materials that mostly cause negative environmental impacts. This study aims to develop banana leaves-polystyrene composites (BL-PS) as a sustainable and low-cost thermal insulator. The BL powder was mixed with PS in different weight ratios (90:10, 80:20, 70:30, and 60:40). Thermal conductivity, electrical conductivity, SEM, XRD, FTIR, TGA, and DSC were carried out on BL and BL-PS composites that were prepared with 10 wt.% of PS powder (BL-PS1) and 30 wt.% of PS
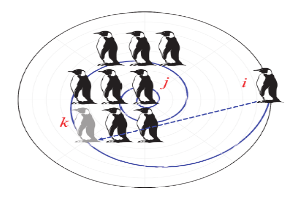
Discretization of emperor penguins colony algorithms with application to modular product design
Modularity concepts attracted the attention of many researchers as it plays an important role in product design problems. Modularity requires dividing a product into a set of modules that are independent between each other and dependent within. The product is represented using Design Structure Matrix (DSM). DSM works as a system representation tool; it visualizes the interrelationship between product elements. In this research, a comparison is conducted between four optimization algorithms: Emperor Penguins Colony (EPC), First Modified Emperor Penguins Colony (MEPC1), Second Modified Emperor
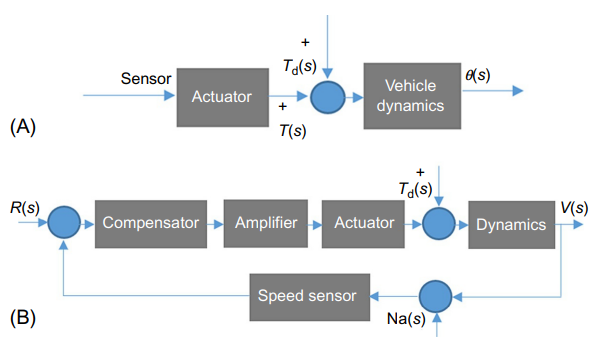
Implementation of PID Controller with PSO Tuning for Autonomous Vehicle
In the use of automatic control and its optimization methods, this research discusses how Proportional Integral Derivative (PID) controller is used to provide a smooth auto-parking for an electrical autonomous car. Different tuning methods are shown, discussed, and applied to the system looking forward to enhancing its performance. Time domain specifications are used as a criterion of comparison between tuning methods in order to select the best tuning method to the system with a proper cost function. Results show that Particle Swarm Optimization (PSO) method gives the best results according
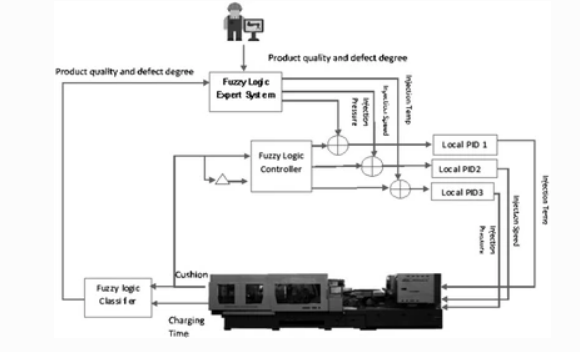
Improved Production Key Performance Indicators (KPI’s) Using Intelligent-Manufacturing Execution Systems (I-MES)
The aim of this research is to reduce the gap between manufacture expertise and management expertise by using modern technology like Manufacturing Execution System (MES) via Artificial Intelligence (AI) and Machin Learning (ML). A design of MES has been proposed and implemented on El-Araby Plastic Injection Molding (PIM) factory. This work is based on the International Society of Automation Standard (ISA-S95). A fully automated data management system has been designed and implemented to control data follow between shop floor e.g. (machines and operators) and management floor e.g. (production
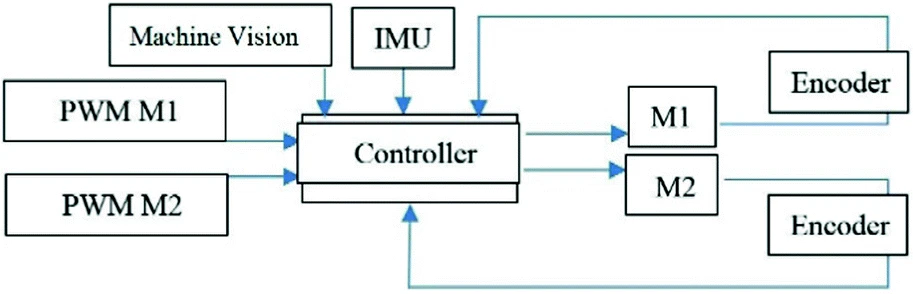
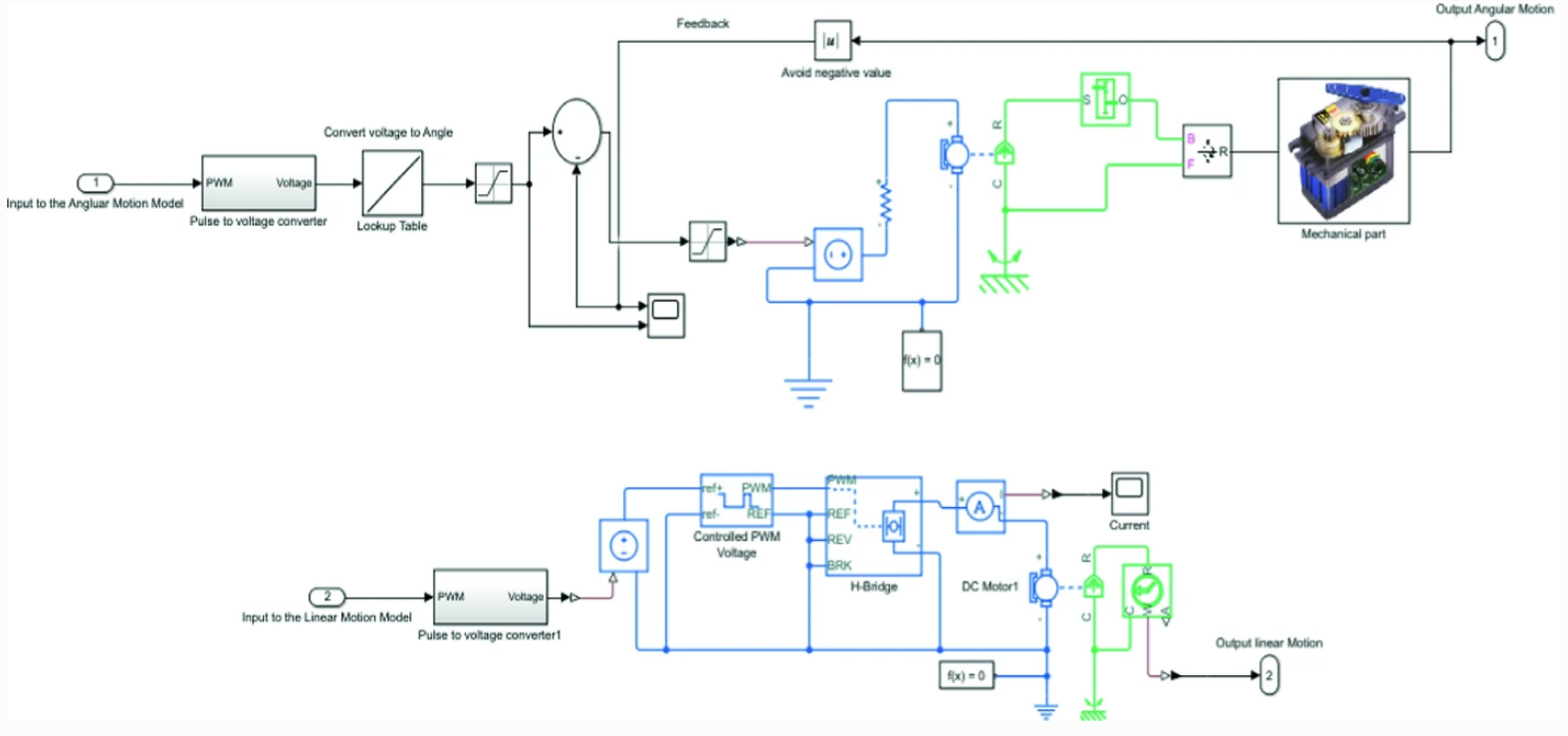
Agricultural Service Mobile Robot Modeling and Control Using Artificial Fuzzy Logic and Machine Vision
This paper represents modeling and control of an agricultural service skid steering mobile robot for the purposes of grass cutting using Proportional-Integral-Derivative (PID) controller and Fuzzy Logic techniques and feedback signals from sensors as IMU, encoders, and Machine Vision. The paper deals with the system modeling into two methods: The first is using Fuzzy modeling as a modeling tool for complex nonlinear system, the second is using MATLAB software system Identification Tool. The study Uses PID, Fuzzy logic controller and fuzzy self-tuning of PID controller to control the path
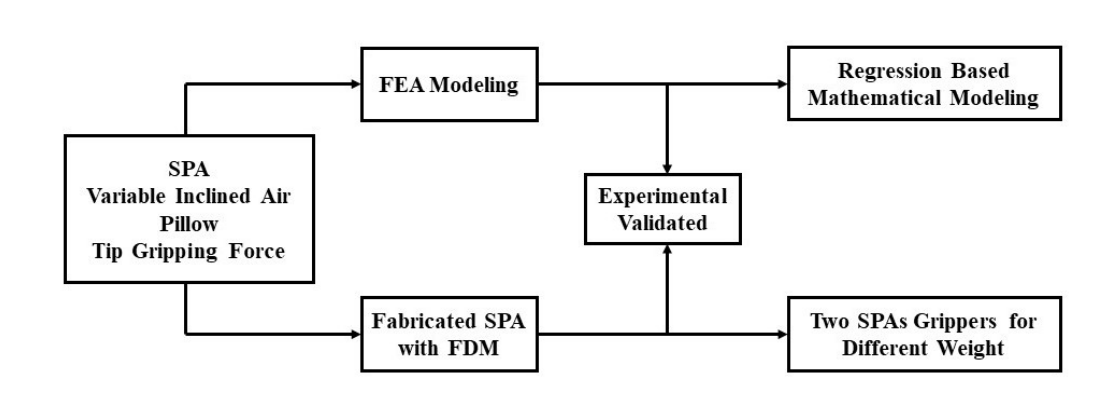
Gripping Force Modeling of a Variable Inclined Air Pillow Soft Pneumatic Actuator
Soft pneumatic actuators grasping tasks is one of the essential rules in robot manipulation methods. The grasping forces can be adapted to handle delicate and hard objects without leaving any damages on the object surfaces. This paper investigates the influence of the inclination angle of the soft pneumatic actuator (SPA) on its gripping force at its end tip. A range of inclination angles for SPA is analyzed using Finite Element Analysis (FEA) to estimate the gripping force at the end tip regarding SPA inner faces pressure. FEA study is conducted based on Hyperelastic material modeling
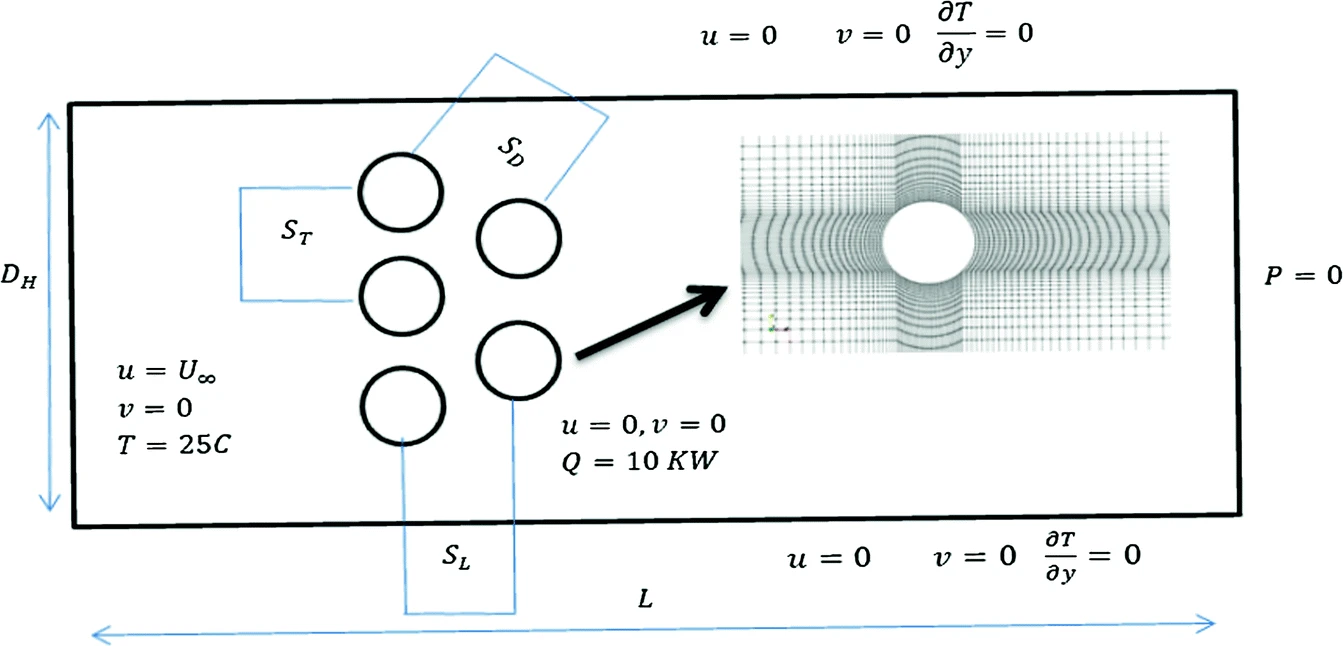
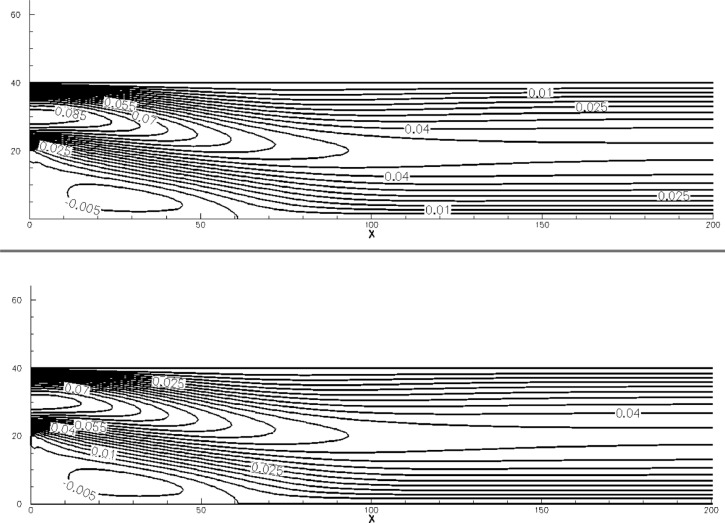
Tuning of PID Controller Using Particle Swarm Optimization for Cross Flow Heat Exchanger Based on CFD System Identification
This paper illustrates the design of proportional–integral–derivative controller (PID) controller of 10 KW air heaters for achieving the set point temperature as fast as possible with minimum response overshoot. Computational fluid dynamic (CFD) numerical simulations are utilized to predict the natural response of 10 KW input power for the air heater. CFD results are validated with experimental empirical correlations that insure the reliability of open loop results. The open loop response of CFD transient simulations is used to model the air heater transfer function and design the classical
An Asymptotically Adaptive Successive Equilibrium Relaxation approach for the accelerated convergence of the Lattice Boltzmann Method
A new approach is proposed to accelerate the convergence of the Lattice Boltzmann method for steady-state problems. The proposed approach uses an adaptive relaxation frequency to accelerate the convergence by assigning more weight to selected parts of the standard algorithm corresponding to different phases of the convergence to the steady-state solution. The proposed algorithm is simple, straightforward and does not impose any additional computational cost to the standard algorithm. Different simulation cases are presented with the corresponding speedup. Finally, guidelines for the selection