Experimental Kinematic Modeling of 6-DOF Serial Manipulator Using Hybrid Deep Learning
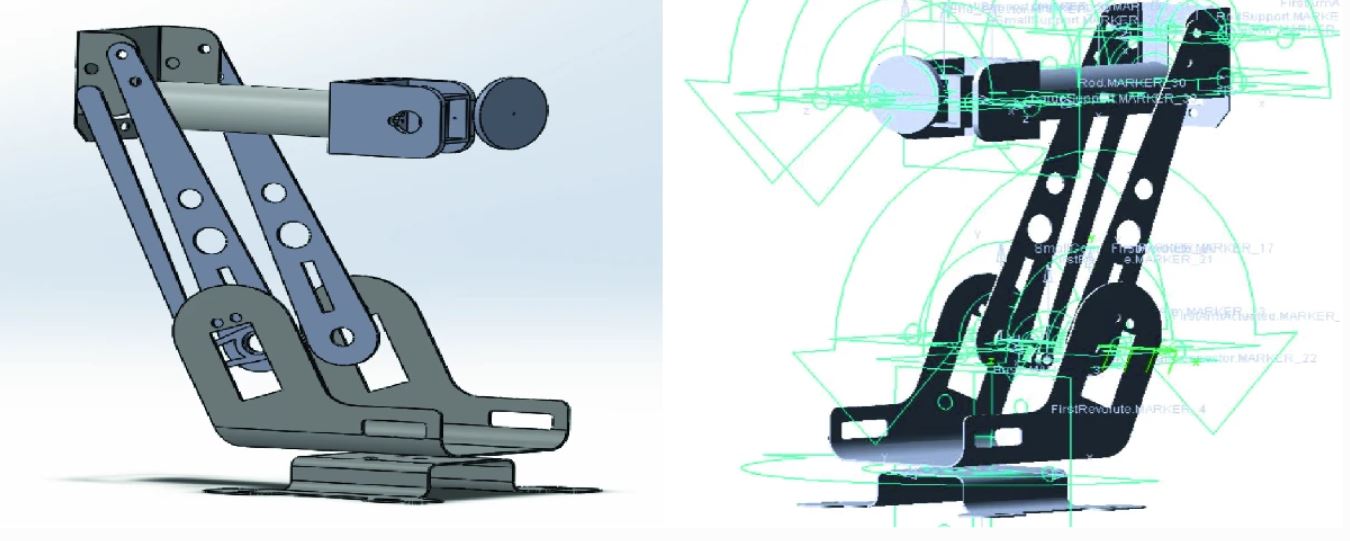
According to its significance, robotics is always an area of interest for research and further development. While robots have varying types, design and sizes, the six degrees of freedom (DOF) serial manipulator is a famous robotic arm that has a vast areas of applications, not only in industrial application, but also in other fields such as medical and exploration applications. Accordingly, control and optimization of such robotic arm is crucial and needed. In this paper, different analyses are done on the chosen design of robotic arm. Forward kinematics are calculated and validated, then simulation using MSC ADAMS is done, followed by experimentation and tracking using Microsoft Kinect. Two approaches are used in this study: adaprive neuro fuzzy (ANF) system optimized by simulated annealing (SA) algorithm and convolutional neural networks (CNNs) optimized by adaptive moment estimation (Adam). The same inputs are given to both models and their results are compared in order to determine the best fit algorithm for higher precision in the given robotic model. The findings have shown that the accuracy of CNNs is higher. Furthermore, this advantage has a higher cost for the time of computation than for NFs with SA. © 2020, Springer Nature Switzerland AG.