
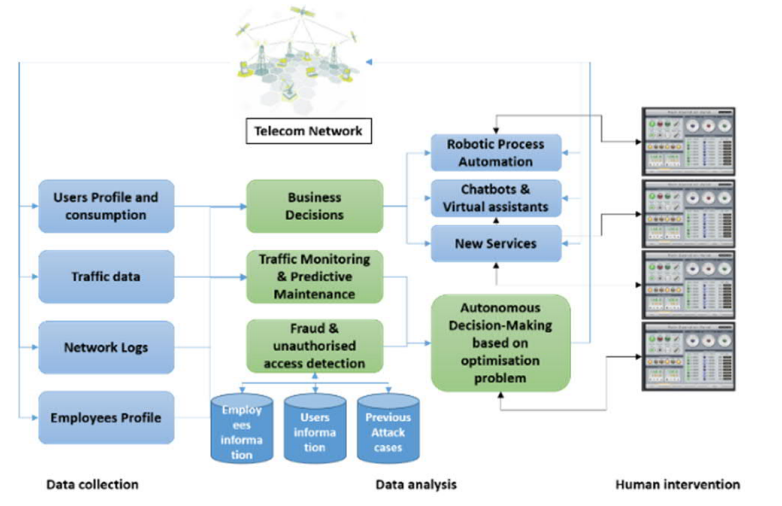
A Review of Machine learning Use-Cases in Telecommunication Industry in the 5G Era
With the development of the 5G and Internet of things (IoT) applications, which lead to an enormous amount of data, the need for efficient data-driven algorithms has become crucial. Security concerns are therefore expected to be raised using state-of-the-art information technology (IT) as data may be vulnerable to remote attacks. As a result, this paper provides a high-level overview of machine-learning use-cases for data-driven, maintaining security, or easing telecommunications operating processes. It emphasizes the importance of analyzing the role of machine learning in the
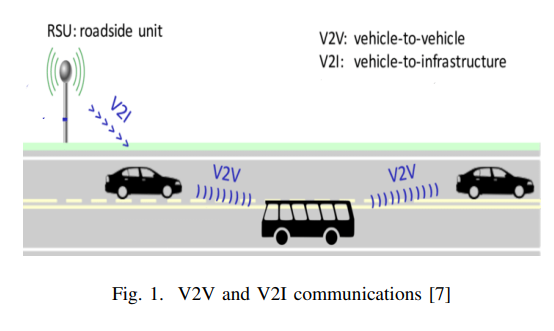
Collision Probability Computation for Road Intersections Based on Vehicle to Infrastructure Communication
In recent years, many probability models proposed to calculate the collision probability for each vehicle and those models used in collision avoidance algorithms and intersection management algorithms. In this paper, we introduce a method to calculate the collision probability of vehicles at an urban intersection. The proposed model uses the current position, speed, acceleration, and turning direction then each vehicle shares its required information to the roadside unit (RSU) via the Vehicle to Infrastructures (V2I). RSU can predict each vehicle's path in intersections by using the received
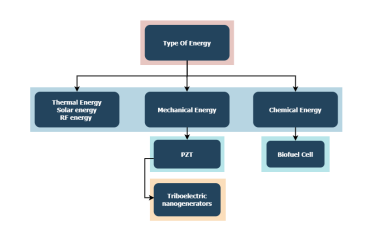
Study of Energy Harvesters for Wearable Devices
Energy harvesting was and still an important point of research. Batteries have been utilized for a long time, but they are now not compatible with the downsizing of technology. Also, their need to be recharged and changed periodically is not very desirable, therefore over the years energy harvesting from the environment and the human body have been investigated. Three energy harvesting methods which are the Piezoelectric energy harvesters, the Enzymatic Biofuel cells, and Triboelectric nanogenerators (TENGs) are being discussed in the paper. Although Biofuel cells have been investigated for a

Swarm intelligence application to UAV aided IoT data acquisition deployment optimization
It is feasible and safe to use unmanned aerial vehicle (UAV) as the data collection platform of the Internet of things (IoT). In order to save the energy loss of the platform and make the UAV perform the collection work effectively, it is necessary to optimize the deployment of UAV. The objective problem is to minimize the sum of the lost energy of UAV and the loss of data transmission of Internet of things devices. The key to solving the problem is to calculate the location of the docking points and the number of docking points when the UAV is working to collect data. This paper proposes a
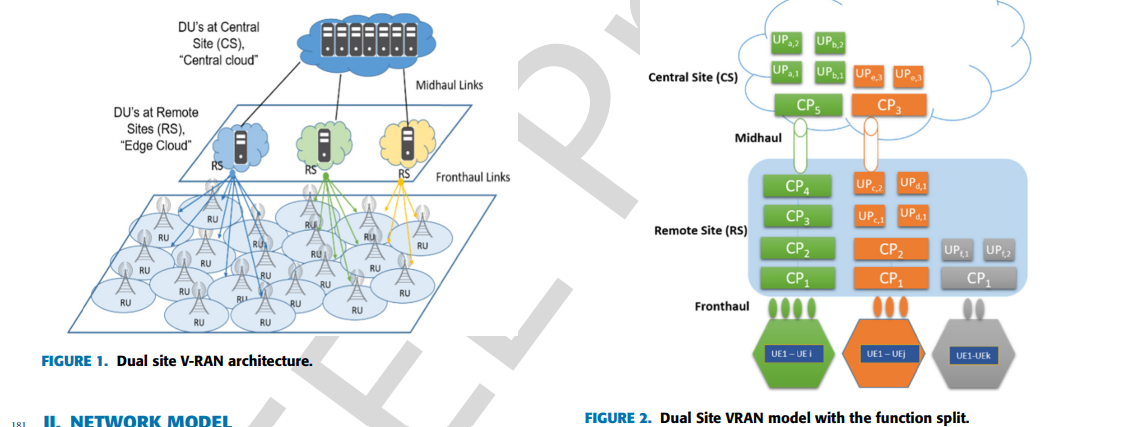
Optimum functional splits for optimizing energy consumption in V-RAn
A virtualized radio access network (V-RAN) is considered one of the key research points in the development of 5G and the interception of machine learning algorithms in the Telecom industry. Recent technological advancements in Network Function Virtualization (NFV) and Software Defined Radio (SDR) are the main blocks towards V-RAN that have enabled the virtualization of dual-site processing instead of all BBU processing as in the traditional RAN. As a result, several types of research discussed the trade-off between power and bandwidth consumption in V-RAN. Processing at remote locations
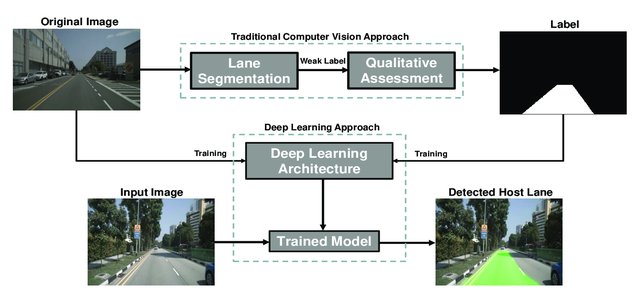
A Deep Learning-Based Benchmarking Framework for Lane Segmentation in the Complex and Dynamic Road Scenes
Automatic lane detection is a classical task in autonomous vehicles that traditional computer vision techniques can perform. However, such techniques lack reliability for achieving high accuracy while maintaining adequate time complexity in the context of real-time detection in complex and dynamic road scenes. Deep neural networks have proved their ability to achieve competing accuracy and time complexity while training them on manually labeled data. Yet, the unavailability of segmentation masks for host lanes in harsh road environments hinders fully supervised methods’ operability on such a

Stochastic travelling advisor problem simulation with a case study: A novel binary gaining-sharing knowledge-based optimization algorithm
This article proposes a new problem which is called the Stochastic Travelling Advisor Problem (STAP) in network optimization, and it is defined for an advisory group who wants to choose a subset of candidate workplaces comprising the most profitable route within the time limit of day working hours. A nonlinear binary mathematical model is formulated and a real application case study in the occupational health and safety field is presented. The problem has a stochastic nature in travelling and advising times since the deterministic models are not appropriate for such real-life problems. The

Neural Knapsack: A Neural Network Based Solver for the Knapsack Problem
This paper introduces a heuristic solver based on neural networks and deep learning for the knapsack problem. The solver is inspired by mechanisms and strategies used by both algorithmic solvers and humans. The neural model of the solver is based on introducing several biases in the architecture. We introduce a stored memory of vectors that holds up items representations and their relationship to the capacity of the knapsack and a module that allows the solver to access all the previous outputs it generated. The solver is trained and tested on synthetic datasets that represent a variety of
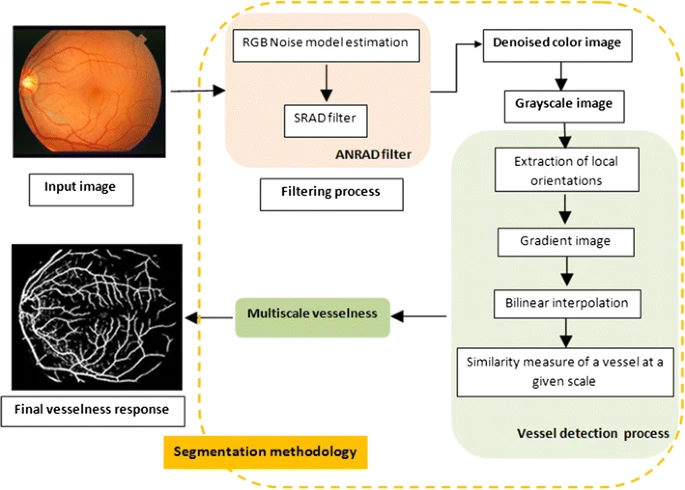
Noise-estimation-based anisotropic diffusion approach for retinal blood vessel segmentation
Recently, numerous research works in retinal-structure analysis have been performed to analyze retinal images for diagnosing and preventing ocular diseases such as diabetic retinopathy, which is the first most common causes of vision loss in the world. In this paper, an algorithm for vessel detection in fundus images is employed. First, a denoising process using the noise-estimation-based anisotropic diffusion technique is applied to restore connected vessel lines in a retinal image and eliminate noisy lines. Next, a multi-scale line-tracking algorithm is implemented to detect all the blood
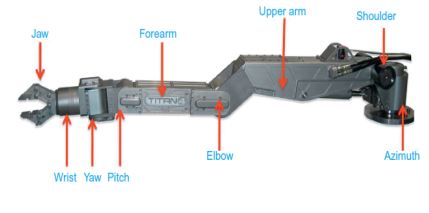
Control design approaches for parallel robot manipulators: A review
In this article, different control design approaches for parallel robot manipulators are presented with two distinguished classes of control strategies in the literature. These are the model-free control and the dynamic control strategy, which is mainly a model-based scheme, and is mostly the alternative when the control requirements are more stringent. The authors strongly believe that this paper will be helpful for researchers and engineers in the field of robotic systems. Copyright 2017 Inderscience Enterprises Ltd.