
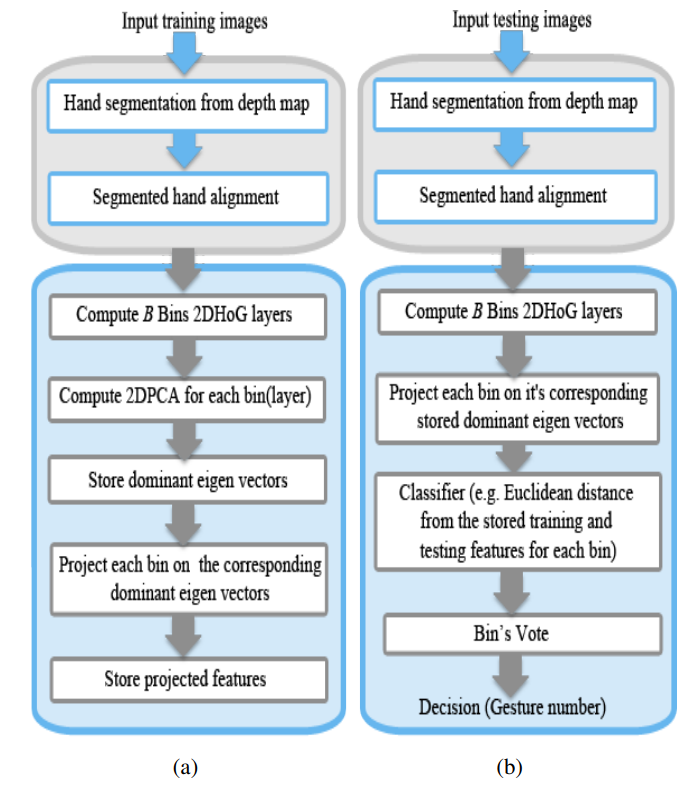
Face and gesture recognition for human computer interaction employing 2DHoG
Face and hand gesture recognition is one of the most challenging topics in computer vision. In this paper, a novel algorithm presenting a new 2D representation of histogram of oriented gradients is proposed, where each bin represents a range of angles dealt with in a separate layer employing 2DPCA. This method maintains the spatial relation between pixels which enhance the recognition accuracy. In addition it can be applied on either face or hand gesture images. Experimental results confirm excellent properties of the proposed algorithm and promotes it for real time applications © 2013 IEEE.
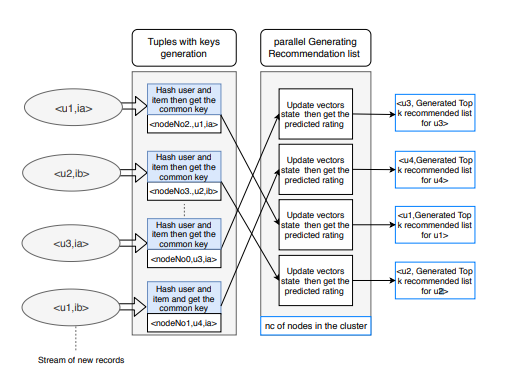
DiSGD: A distributed shared-nothing matrix factorization for large scale online recommender systems
With the web-scale data volumes and high velocity of generation rates, it has become crucial that the training process for recommender systems be a continuous process which is performed on live data, i.e., on data streams. In practice, such systems have to address three main requirements including the ability to adapt their trained model with each incoming data element, the ability to handle concept drifts and the ability to scale with the volume of the data. In principle, matrix factorization is one of the popular approaches to train a recommender model. Stochastic Gradient Descent (SGD) has
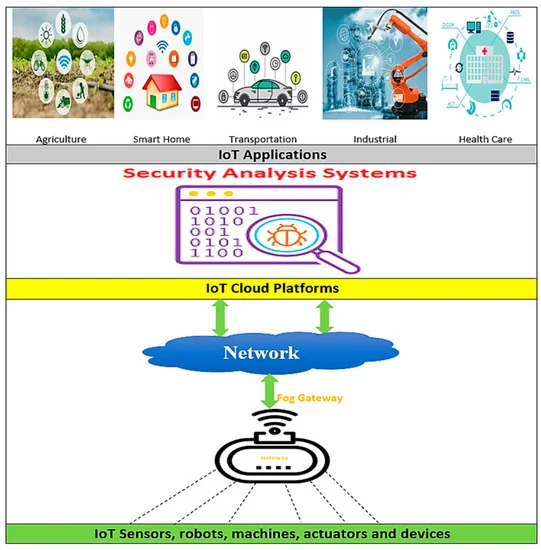
HSAS-MD Analyzer: A Hybrid Security Analysis System Using Model-Checking Technique and Deep Learning for Malware Detection in IoT Apps
Established Internet of Things (IoT) platforms suffer from their inability to determine whether an IoT app is secure or not. A security analysis system (SAS) is a protective shield against any attack that breaks down data privacy and security. Its main task focuses on detecting malware and verifying app behavior. There are many SASs implemented in various IoT applications. Most of them build on utilizing static or dynamic analysis separately. However, the hybrid analysis is the best for obtaining accurate results. The SAS provides an effective outcome according to many criteria related to the
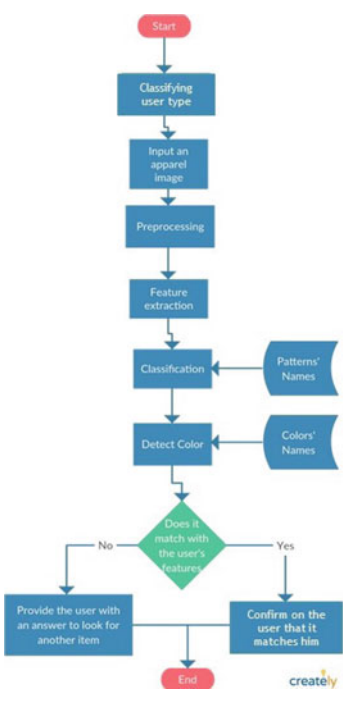
Recognizing Clothing Patterns and Colors for BVI People Using Different Techniques
For blind and visually impaired (BVI) people, it is an arduous task to recognize clothing patterns and colors. It is especially complex to recognize them automatically. This is a highly researched area in image processing. This paper provides BVI with the ability to detect patterns and colors without depending on personal assistance, leading to increasing their confidence. The user first captures an image; then, our system detects colors and patterns. The color model used here is the hue saturation value (HSV). The main colors detected by our system are magenta, cyan, blue, green, red and
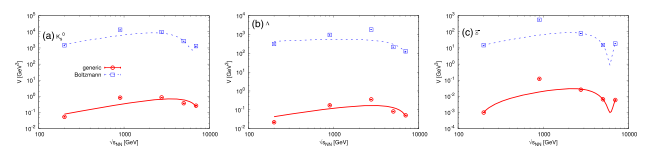
Transverse momentum spectra of strange hadrons within extensive and nonextensive statistics
Using generic (non)extensive statistics, in which the underlying system likely autonomously manifests its extensive and nonextensive statistical nature, we extract various fit parameters from the CMS experiment and compare these to the corresponding results obtained from Tsallis and Boltzmann statistics. The present study is designed to indicate the possible variations between the three types of statistical approaches and characterizes their dependence on collision energy, multiplicity, and size of the system of interest. We analyze the transverse momentum spectra pT of the strange hadrons Ks
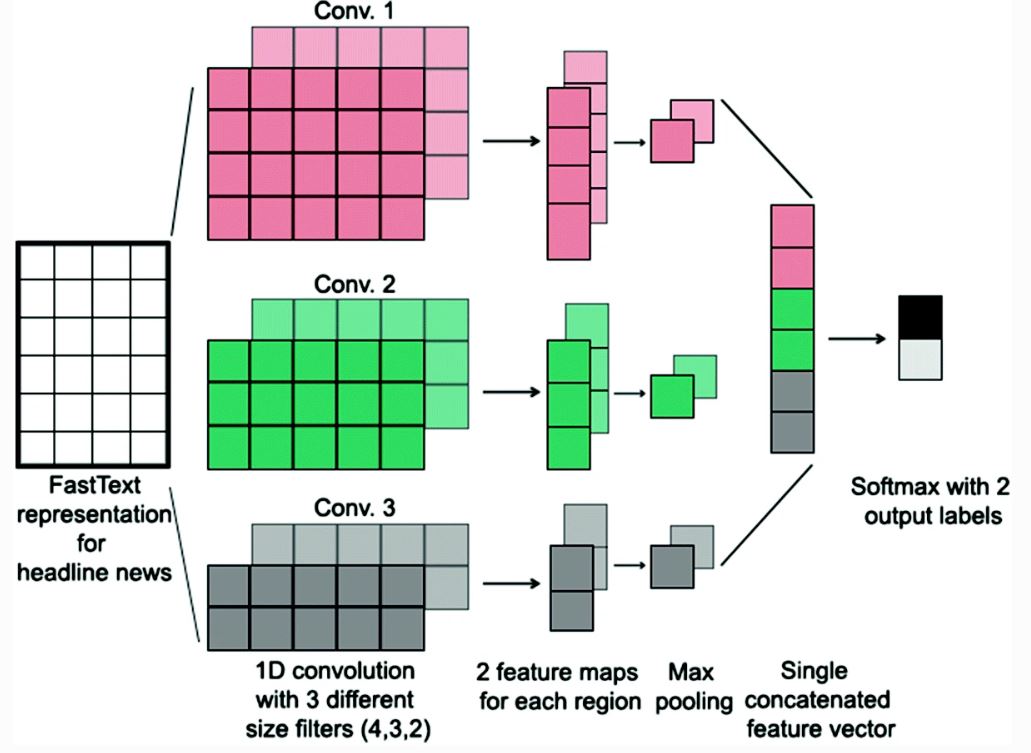
Evaluation of Different Sarcasm Detection Models for Arabic News Headlines
Being sarcastic is to say something and to mean something else. Detecting sarcasm is key for social media analysis to differentiate between the two opposite polarities that an utterance may convey. Different techniques for detecting sarcasm are varying from rule-based models to Machine Learning and Deep Learning models. However, researchers tend to leverage Deep Learning in detecting sarcasm recently. On the other hand, the Arabic language has not witnessed much improvement in this research area. Bridging the gap in sarcasm detection of the Arabic language is the target behind this work. In
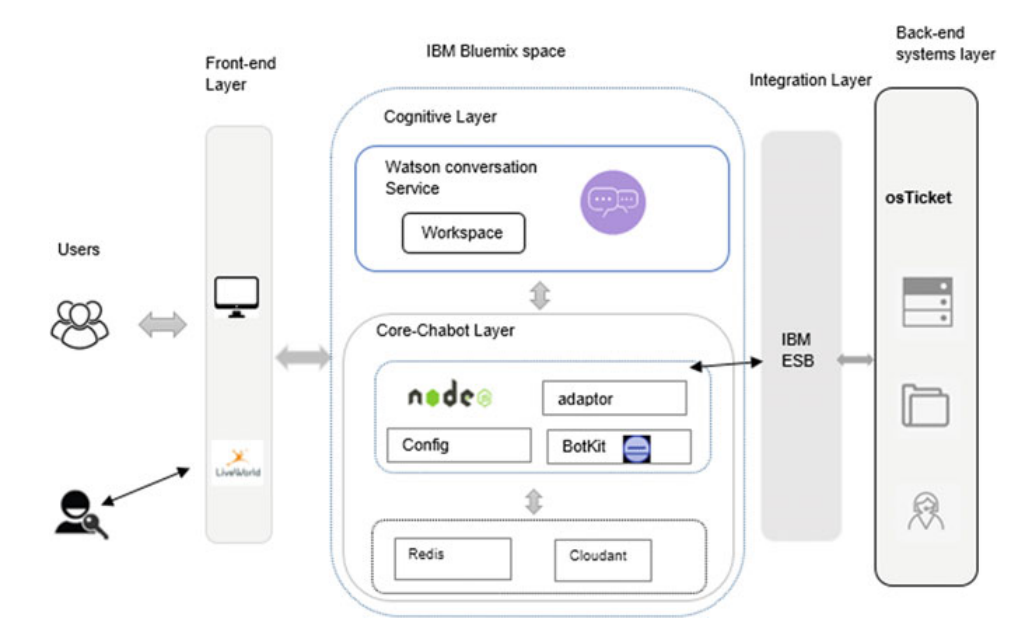
A study about using a cognitive agent in replacing level 1 and 2 service desk activities
The radical change in technology and high customer expectations and demand are pushing the service desk to provide a competent service for the customers. And this service should be faster, more flexible and gives a more accurate response and high user experience. Replacing the human call agent’s activities with a cognitive agent could improve the user experience by providing a faster response to customer’s requests, removing the human errors and giving 24/7 support with less operational cost. The cognitive agent has the potential to scale personalized and tailored interactions. And this will
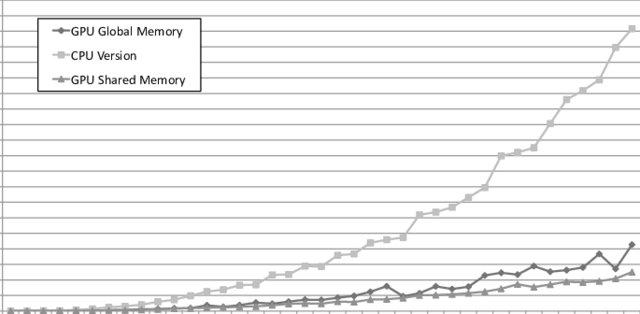
A GPU-enabled solver for time-constrained linear sum assignment problems
This paper deals with solving large instances of the Linear Sum Assignment Problems (LSAPs) under realtime constraints, using Graphical Processing Units (GPUs). The motivating scenario is an industrial application for P2P live streaming that is moderated by a central tracker that is periodically solving LSAP instances to optimize the connectivity of thousands of peers. However, our findings are generic enough to be applied in other contexts. Our main contribution is a parallel version of a heuristic algorithm called Deep Greedy Switching (DGS) on GPUs using the CUDA programming language. DGS
A Secure Federated Learning Framework for 5G Networks
Federated learning (FL) has recently been proposed as an emerging paradigm to build machine learning models using distributed training datasets that are locally stored and maintained on different devices in 5G networks while providing privacy preservation for participants. In FL, the central aggregator accumulates local updates uploaded by participants to update a global model. However, there are two critical security threats: poisoning and membership inference attacks. These attacks may be carried out by malicious or unreliable participants, resulting in the construction failure of global
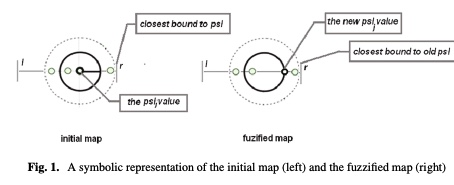
A fuzzy approach of sensitivity for multiple colonies on ant colony optimization
In order to solve combinatorial optimization problem are used mainly hybrid heuristics. Inspired from nature, both genetic and ant colony algorithms could be used in a hybrid model by using their benefits. The paper introduces a new model of Ant Colony Optimization using multiple colonies with different level of sensitivity to the ant’s pheromone. The colonies react different to the changing environment, based on their level of sensitivity and thus the exploration of the solution space is extended. Several discussion follows about the fuzziness degree of sensitivity and its influence on the