Gray Wolf Optimization of Fractional Order Control of 3-Omni Wheels Mobile Robot: Experimental Study
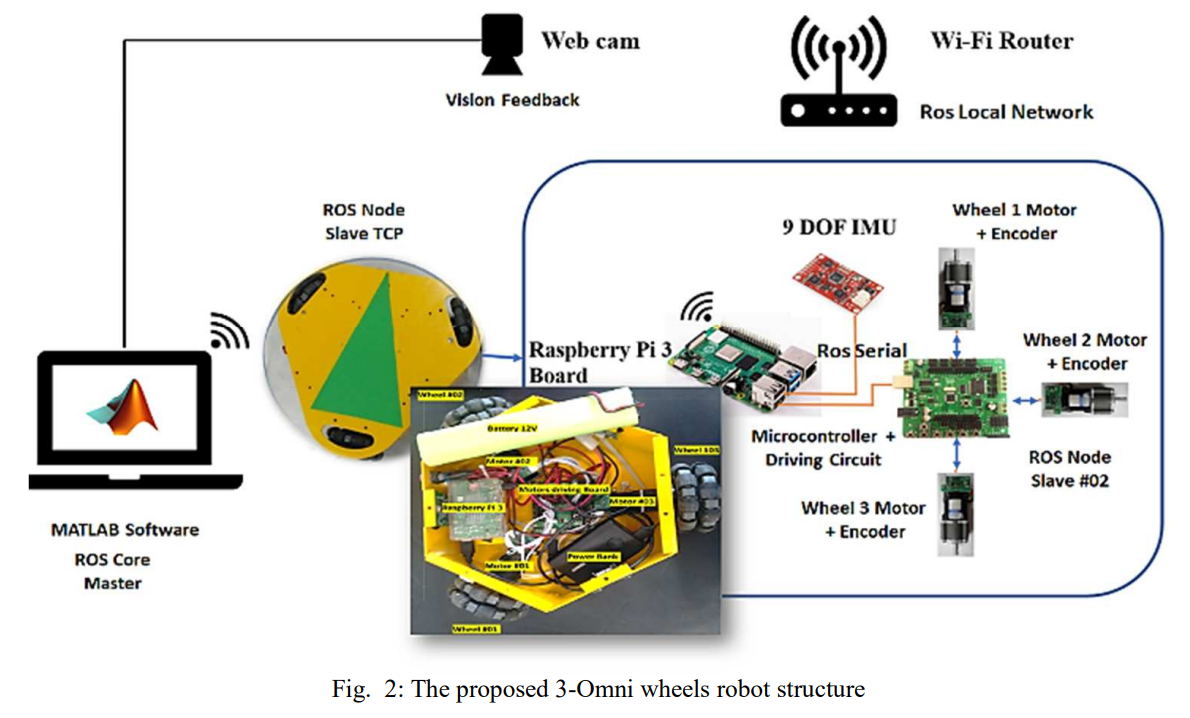
Committing robotics with artificial intelligence becomes mandatory collaboration with distinct environments. Omnidirectional Wheeled (Omni-WD) mobile robots are one of the robots that interact with humans in various circumstances, where it is important to function effectively and accurately. In this paper, the distinction of a 3WD-Omni model and control using machine vision is demonstrated. The use of fractional order (FO) calculus has been stated to increase the degrees of freedom of the controller over the integer ones. Hybridization of FO control and metaheuristics optimization is reported to enhance the control performance. Particle Swarm Optimizer (PSO) and Gray Wolf Optimizer (GWO) have been used for tuning the classical PID and FO-PID controllers. A comparative study between the optimized classical PID and FOPID has been performed using different paths and optimization methods. The results of the comparative study are mentored using different performance indices. The superior performance of FOPID tuned by GWO has been proven over all other techniques. © 2020 IEEE.