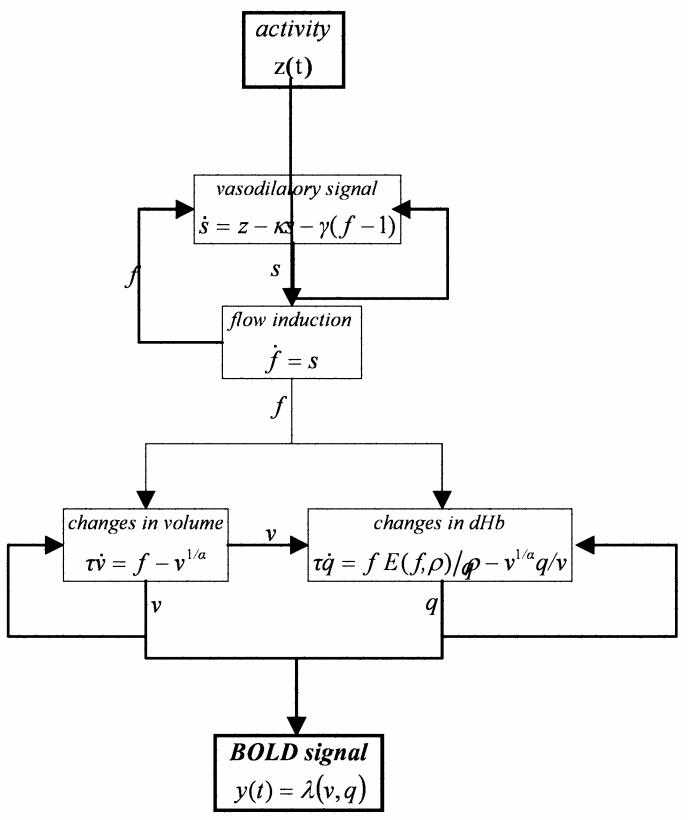
Modeling the interaction of brain regions based on functional magnetic resonance imaging time series
We propose a model that describes the interaction of several Brain Regions based on Functional Magnetic Resonance Imaging (FMRI) time series to make inferences about functional integration and segregation within the human brain. The method is demonstrated using dynamic causal modeling (OeM) using real data to show how such models are able to characterize interregional dependence. We extend estimating and reviewing designed model to characterize the interactions between regions. A further benefit is to estimate the effective connectivity between these regions. All designs, estimates, reviews
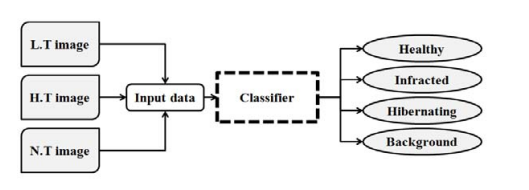
Different regions identification in composite strain-encoded (C-SENC) images using machine learning techniques
Different heart tissue identification is important for therapeutic decision-making in patients with myocardial infarction (MI), this provides physicians with a better clinical decision-making tool. Composite Strain Encoding (C-SENC) is an MRI acquisition technique that is used to acquire cardiac tissue viability and contractility images. It combines the use of blackblood delayed-enhancement (DE) imaging to identify the infracted (dead) tissue inside the heart muscle and the ability to image myocardial deformation from the strain-encoding (SENC) imaging technique. In this work, various machine
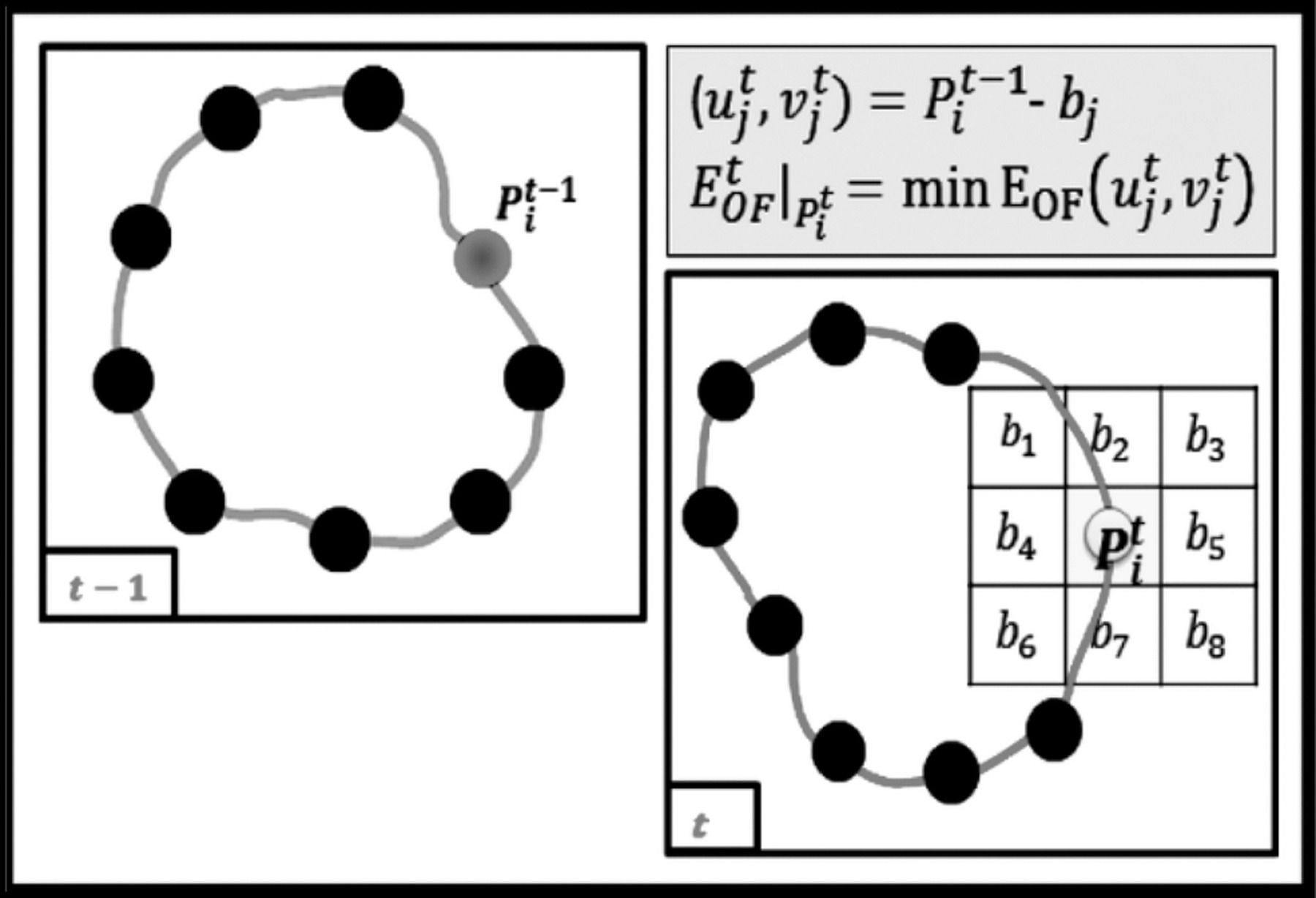
Greedy framework for optical flow tracking of myocardium contours
Optical flow (OF) tracking of the myocardium contours has a potential in segmenting the myocardium in time sequences of cardiac medical images. Nevertheless, to estimate the displacement field of the contour points, a number of assumptions are required to solve an under-determined set of optical flow equations. In this work, a new framework is proposed to solve the OF tracking problem using greedy optimisation algorithm. The new framework allows different types of constraints such as motion invariance, shape and topology to be applied in a unified way. The developed methods are applied to a
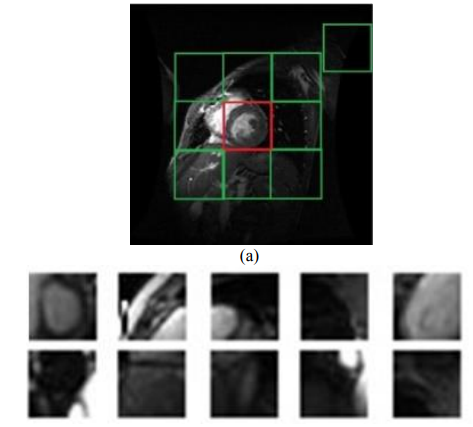
Automatic localization of the left ventricle in cardiac MRI images using deep learning
Automatic localization of the left ventricle (LV) in cardiac MRI images is an essential step for automatic segmentation, functional analysis, and content based retrieval of cardiac images. In this paper, we introduce a new approach based on deep Convolutional Neural Network (CNN) to localize the LV in cardiac MRI in short axis views. A six-layer CNN with different kernel sizes was employed for feature extraction, followed by Softmax fully connected layer for classification. The pyramids of scales analysis was introduced in order to take account of the different sizes of the heart. A publically
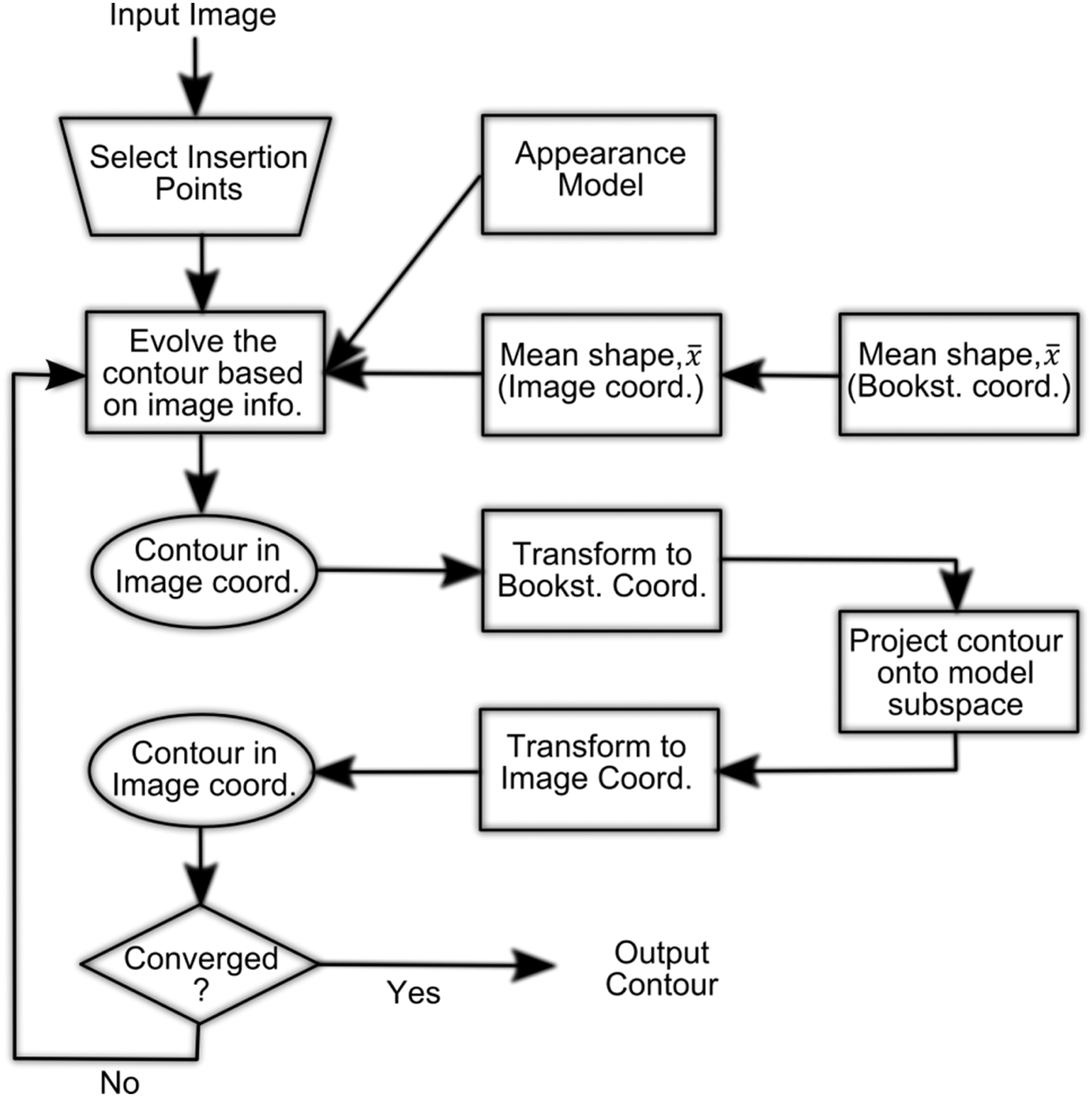
Segmentation of the right ventricle in MRI images using a dual active shape model
Active shape models (ASM) showed to have potential for segmenting the right ventricle (RV) in cardiac magnetic resonance images (MRIs). Nevertheless, the large variability and complexity of the RV shape do not allow for concisely capturing all possible shape variations among patients and anatomical cross-sections. Noticeably, the latter increases the number of iterations required to converge to a proper solution and reduces the segmentation accuracy. In this study, the authors propose a new ASM framework that can model the RV shape in short-axis cardiac MRI images. In this framework, the RV
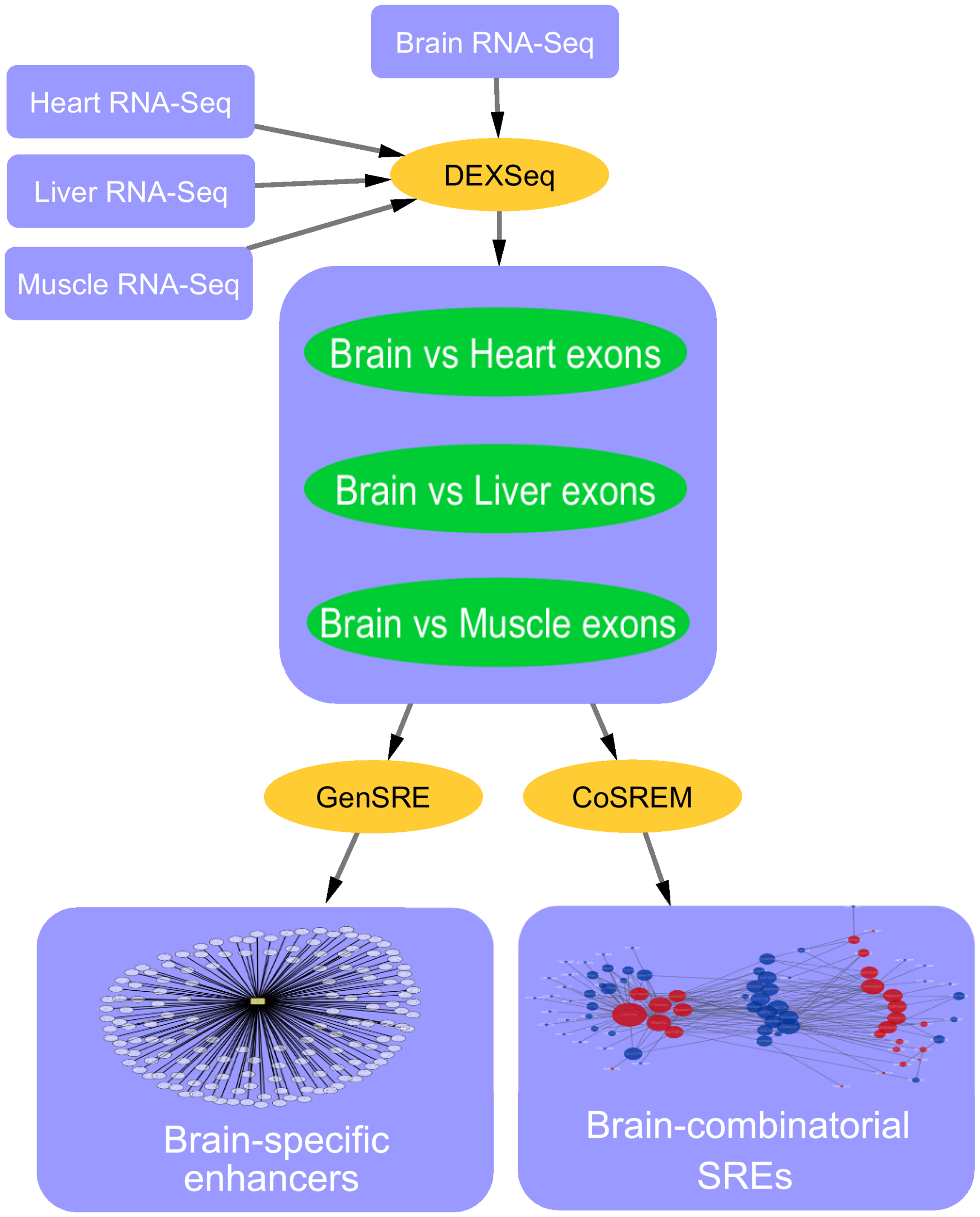
Computational identification of tissue-specific splicing regulatory elements in human genes from RNA-Seq Data
Alternative splicing is a vital process for regulating gene expression and promoting proteomic diversity. It plays a key role in tissue-specific expressed genes. This specificity is mainly regulated by splicing factors that bind to specific sequences called splicing regulatory elements (SREs). Here, we report a genome-wide analysis to study alternative splicing on multiple tissues, including brain, heart, liver, and muscle. We propose a pipeline to identify differential exons across tissues and hence tissue-specific SREs. In our pipeline, we utilize the DEXSeq package along with our previously
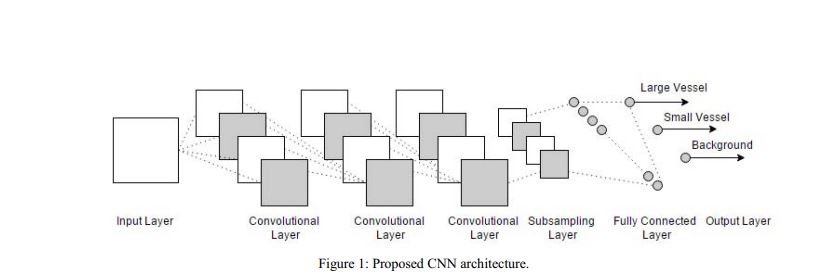
Convolutional neural networks for deep feature learning in retinal vessel segmentation
Analysis of retinal vessels in fundus images provides a valuable tool for characterizing many retinal and systemic diseases. Accurate automatic segmentation of these vessels is usually required as an essential analysis step. In this work, we propose a new formulation of deep Convolutional Neural Networks that allows simple and accurate segmentation of the retinal vessels. A major modification in this work is to reduce the intra-class variance by formulating the problem as a Three-class problem that differentiates: large vessels, small vessels, and background areas. In addition, different sizes
Detection of myocardial infarction based on novel deep transfer learning methods for urban healthcare in smart cities
One of the common cardiac disorders is a cardiac attack called Myocardial infarction (MI), which occurs due to the blockage of one or more coronary arteries. Timely treatment of MI is important and slight delay results in severe consequences. Electrocardiogram (ECG) is the main diagnostic tool to monitor and reveal the MI signals. The complex nature of MI signals along with noise poses challenges to doctors for accurate and quick diagnosis. Manually studying large amounts of ECG data can be tedious and time-consuming. Therefore, there is a need for methods to automatically analyze the ECG data
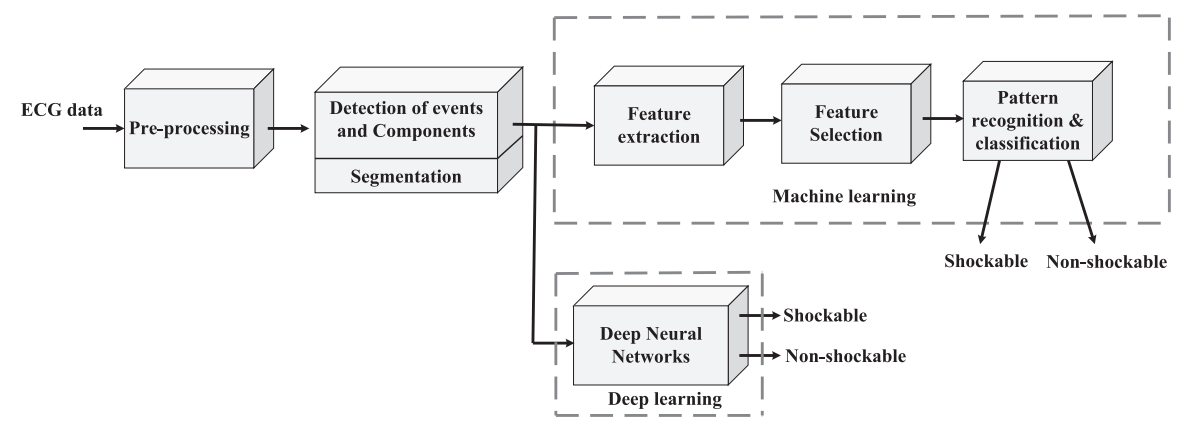
Automated detection of shockable ECG signals: A review
Sudden cardiac death from lethal arrhythmia is a preventable cause of death. Ventricular fibrillation and tachycardia are shockable electrocardiographic (ECG)rhythms that can respond to emergency electrical shock therapy and revert to normal sinus rhythm if diagnosed early upon cardiac arrest with the restoration of adequate cardiac pump function. However, manual inspection of ECG signals is a difficult task in the acute setting. Thus, computer-aided arrhythmia classification (CAAC) systems have been developed to detect shockable ECG rhythm. Traditional machine learning and deep learning