
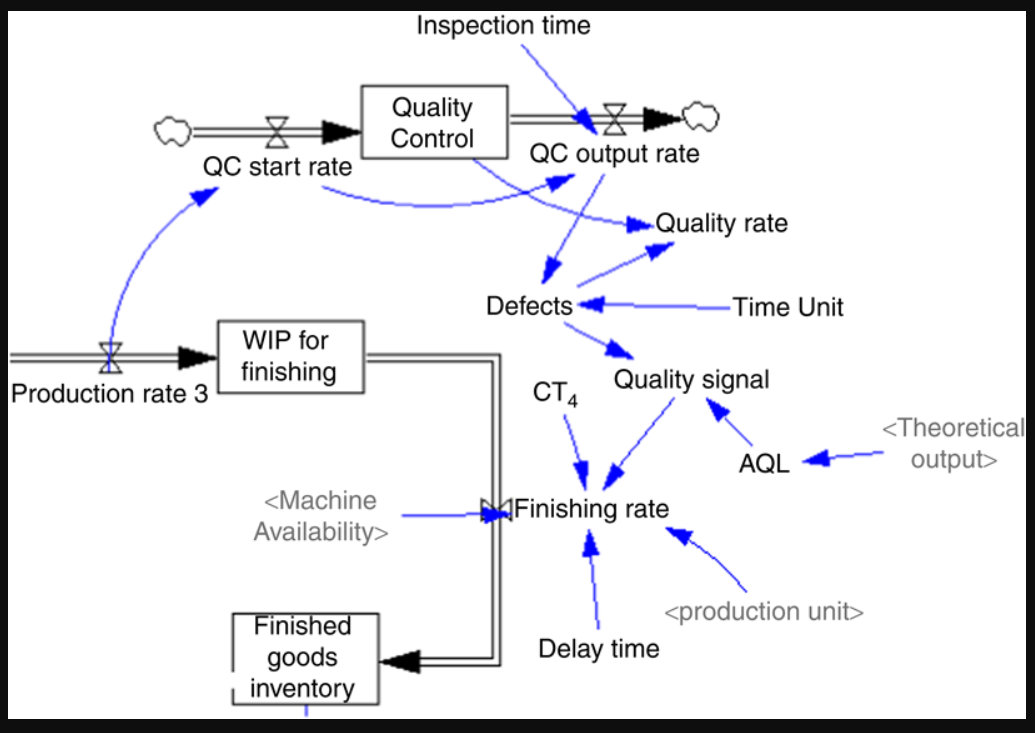
Assessing leanness level with demand dynamics in a multi-stage production system
Purpose - The purpose of this paper is to present a dynamic model to measure the degree of system's leanness under dynamic demand conditions using a novel integrated metric. Design/methodology/approach - The multi-stage production system model is based on a system dynamics approach. The leanness level is measured using a new developed integrated metric that combines efficiency,WIP performance as well as service level. The analysis includes design of experiment technique at the initial analysis to examine the most significant parameters impacting the leanness score and then followed by
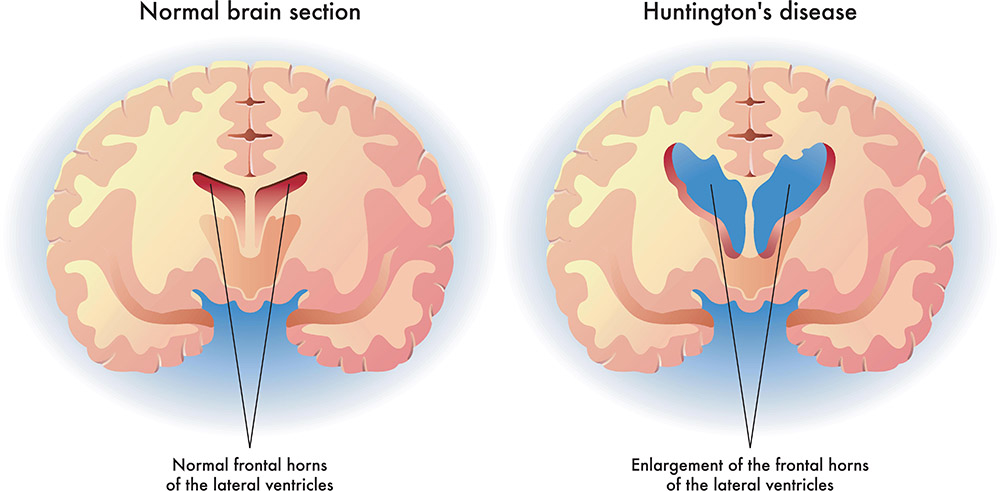
INVESTIGATION OF DIFFERENTIALLY EXPRESSED GENE RELATED TO HUNTINGTON'S DISEASE USING GENETIC ALGORITHM
neurodegenerative diseases have complex pathological mechanisms. Detecting disease-associated genes with typical differentially expressed gene selection approaches are ineffective. Recent studies have shown that wrappers Evolutionary optimization methods perform well in feature selection for high dimensional data, but they are computationally costly. This paper proposes a simple method based on a genetic algorithm engaged with the Empirical Bays T-statistics test to enhance the disease-associated gene selection process. The proposed method is applied to Affymetrix microarray data from
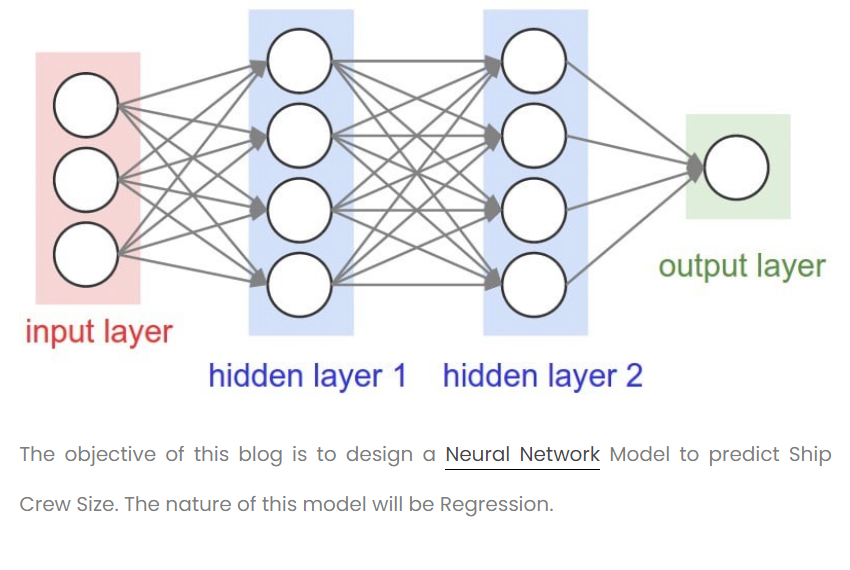
ANN-Python prediction model for the compressive strength of green concrete
Purpose: Utilization of sustainable materials is a global demand in the construction industry. Hence, this study aims to integrate waste management and artificial intelligence by developing an artificial neural network (ANN) model to predict the compressive strength of green concrete. The proposed model allows the use of recycled coarse aggregate (RCA), recycled fine aggregate (RFA) and fly ash (FA) as partial replacements of concrete constituents. Design/methodology/approach: The model is constructed, trained and validated using python through a set of experimental data collected from the

Native Mobile Applications UI Code Conversion
With the widespread use of mobile applications in daily life, it has become crucial for software companies to develop the applications for the most popular platforms like Android and iOS. Using a native development is time consuming and costly. Cross-platform mobile development like Xamarin and React native emerged as a solution to the mentioned problem of native development for the time and cost. Meanwhile it requires the developers to learn a new language. Other tools are converting the mobile apps of specific platform to the corresponding platform, but most of them still lack the mobile
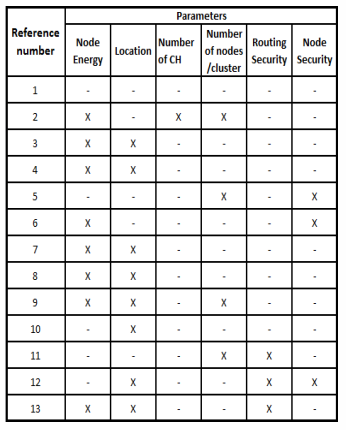
Cluster Head election in Wireless Sensor Networks
Wireless Sensor Networks (WSNs) consist of a collection of cheap, easy to deploy Sensor nodes arranged together to fulfill a specific purpose (monitoring, tracking...etc.). A WSN network is composed of a Base Station (BS) and collection of sensors. There are a lot of approaches for the network construction. Amongst them is the hierarchical structure, where the network is divided into clusters and the node inside this cluster communicates with BS through a chosen leader called Cluster Head (CH). In this paper, we present cluster-Head election algorithms for WSNs. We will discuss the operations
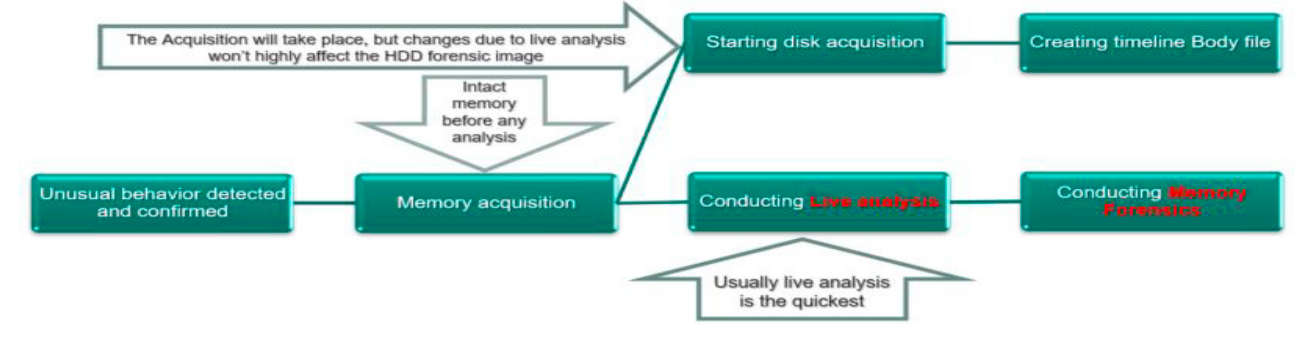
Comparison study of digital forensics analysis techniques
Recently, digital forensics analysis got a great attention in IT security. This is especially after cyber incidents are getting new form of organized crime which introduced Advanced Persistent Threats (APT), and hacking Kill Chain definitions. The threat intense rises when it is affecting the healthcare organization where it will be life-threatening. Handling such incidents is a great challenge for handlers to uncover the attack steps. With various sources of evidential data that require analysis, one analysis technique can be more beneficial than another, comparing to the time and resources
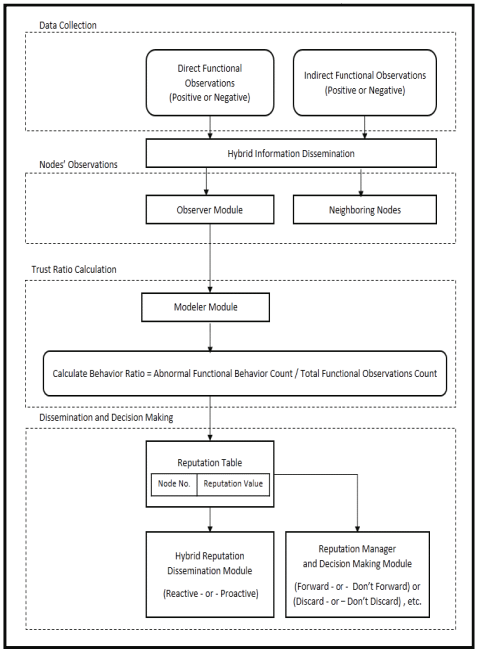
MDAC: A new reputation system for misbehavior detection and control in ad hoc networks
Reputation systems are an emerging area of research in ad-hoc networks. They have been introduced as a security solution for nodes' misbehaving problem. A reputation system should cope with any kind of misbehavior. It enables honest nodes to make fair decisions about their neighbors. This may encourage nodes to behave well and cooperate in order to avoid being penalized or isolated. In this paper, we propose a new reputation system for Misbehavior Detection And Control in ad hoc Networks (MDAC). It aims to overcome some of the unsolved issues of other reputation systems, and it is customizable
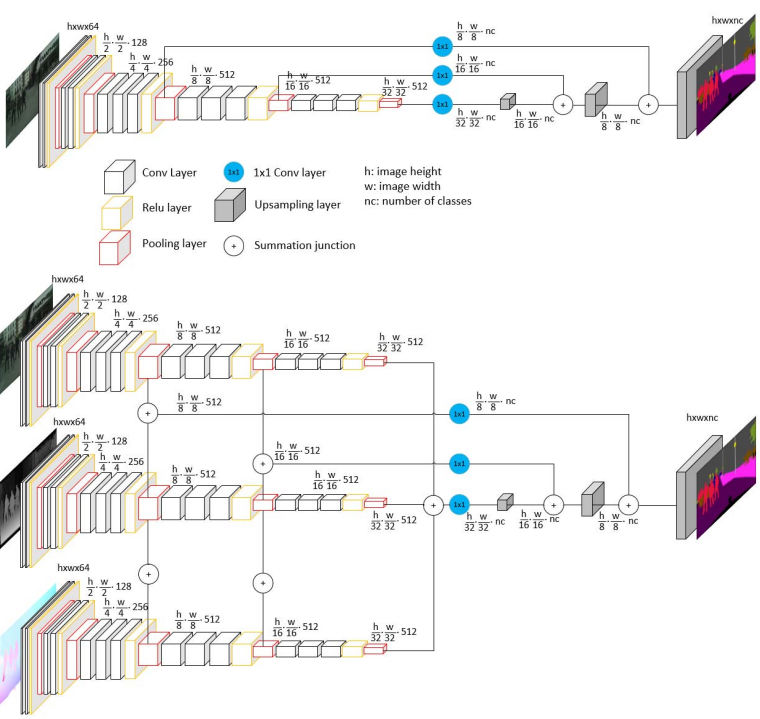
Motion and depth augmented semantic segmentation for autonomous navigation
Motion and depth provide critical information in autonomous driving and they are commonly used for generic object detection. In this paper, we leverage them for improving semantic segmentation. Depth cues can be useful for detecting road as it lies below the horizon line. There is also a strong structural similarity for different instances of different objects including buildings and trees. Motion cues are useful as the scene is highly dynamic with moving objects including vehicles and pedestrians. This work utilizes geometric information modelled by depth maps and motion cues represented by
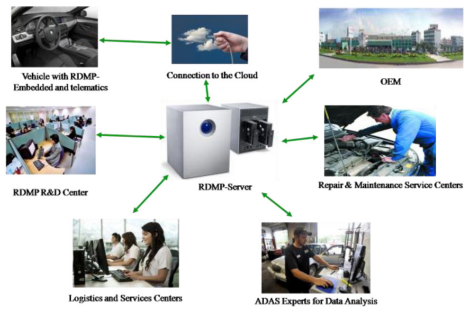
Remote Diagnosis, Maintenance and Prognosis for Advanced Driver Assistance Systems Using Machine Learning Algorithms
New challenges and complexities are continuously increasing in advanced driver assistance systems (ADAS) development (e.g. active safety, driver assistant and autonomous vehicle systems). Therefore, the health management of ADAS’ components needs special improvements. Since software contribution in ADAS’ development is increasing significantly, remote diagnosis and maintenance for ADAS become more important. Furthermore, it is highly recommended to predict the remaining useful life (RUL) for the prognosis of ADAS’ safety critical components; e.g. (Ultrasonic, Cameras, Radar, LIDAR). This paper
Tracking ground targets from a UAV using new P-N constraints
This paper presents improved automatic moving target detection and tracking framework that is suitable for UAV imagery. The framework is comprised of motion compensation phase to detect moving targets from a moving camera, target state estimation with Kalman filter, and overlap-rate-based data association. Finally, P-N learning is used to maintain target appearance by utilizing novel structural constraints to select positive and negative samples, where data association decisions are used as positive (P) constraints. After learning target appearance, a cascaded classifier is employed to detect