
Visible Light Communications Localization Error Enhancement using Parameter Relaxation
In this paper, we propose applying a parameter relaxation technique to the location estimation algorithm that is based on the Received Signal Strength (RSS) of Visible Light Communications (VLC). A hybrid system of localization balancing is introduced, where the localization algorithm is developed with and without this efficient parameter relaxation. The results show that applying the parameter relaxation reduces the localization Root Mean Square (RMS) error by 43% of that without relaxation; and the processing time is reduced by 18% of that without relaxation. Moreover, the parameter
Early breast cancer diagnostics based on hierarchical machine learning classification for mammography images
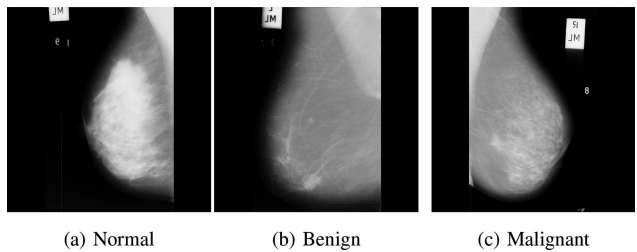
Breast cancer constitutes a significant threat to women’s health and is considered the second leading cause of their death. Breast cancer is a result of abnormal behavior in the functionality of the normal breast cells. Therefore, breast cells tend to grow uncontrollably, forming a tumor that can be felt like a breast lump. Early diagnosis of breast cancer is proved to reduce the risks of death by providing a better chance of identifying a suitable treatment. Machine learning and artificial intelligence play a key role in healthcare systems by assisting physicians in diagnosing early, better

Comparative Study of Vehicular Proactive Caching between Cellular and VLC Networks
The rapid growth of vehicle demand, such as information sharing, entertainment, and multimedia contents, overwhelms the back-haul network. Due to this nature of the network that suffers from high link disconnections and limited resources, it is challenging to develop a new strategy to satisfy users' requirements. Proactive caching is a useful technique to mitigate the load on core networks, and determining the best caching placement of data time to enhance the network is a significant issue. However, radiofrequency is spreading and supporting multiple channels communication, and has a licensed
A Neural Network-Based VLC Indoor Positioning System for Moving Users
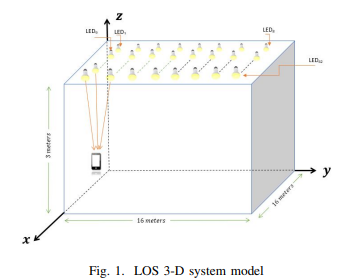
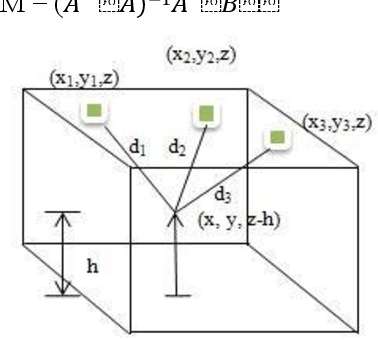
In this paper, we present an indoor visible light communication (VLC) system to estimate the position of a moving user. This system uses two approaches based on received signal strength, trilateration estimation, and neural network estimation. In the VLC system, each transmitter sends its position information via light. A photo-detector receiver supported with the moving user is used to receive the transmitted power from each transmitter. The receiver position is calculated using the estimation of trilateration and the prediction of the neural network. We consider the sight line (LOS) and non
A Novel Companding Technique to Reduce High Peak to Average Power Ratio in OFDM Systems
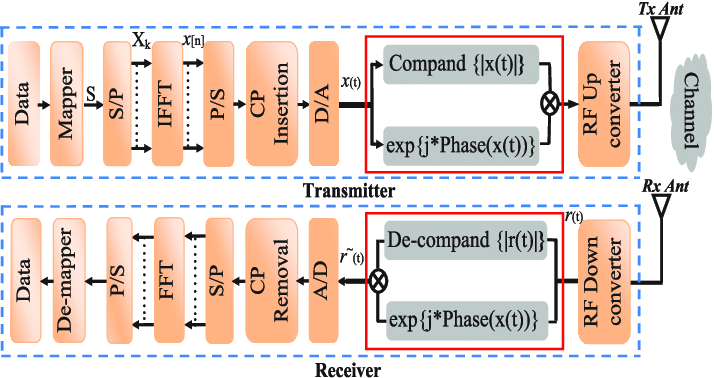
The reduction of the high peak-to-average-power ratio (PAPR) is important to the efficiency of the orthogonal frequency division multiplexing (OFDM) technique. Excessive PAPR contributes to non-linear clipping induced harmonic distortions that reduce system reliability. In this article, a new technique for decreasing the high PAPR in OFDM with minimum effects on the system performance is proposed. The technique uses the image adjust (IMADJS) function to reduce the high PAPR of transmitted OFDM signals by compressing large signals and expanding small signals. In comparison, the IMADJS strategy
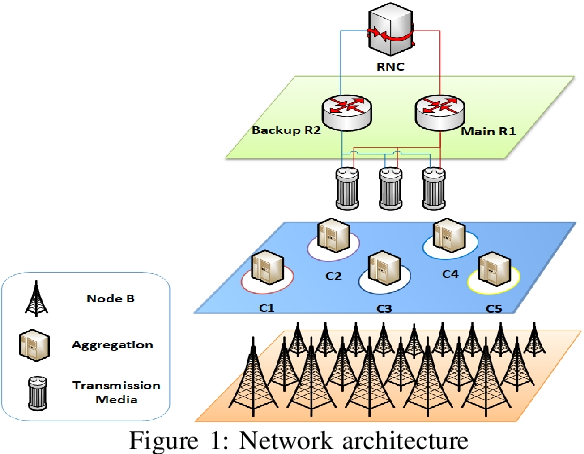
Learning of mobile-traffic patterns for resource management and dynamic power controlling
Recently, the topology control solutions that use static transmission power, transmission range, and link quality, might not be useful. The objective of this paper adapts the transmission power to be adjusted with external changes by applying a machine learning algorithms. We develop a traffic signature algorithm based on traffic clusters of the network sites that have the same behavior then we predict their upcoming changes and correspondingly. The contribution of this work is using this model to create an optimal power distribution function based on traffic load. Furthermore, we propose a
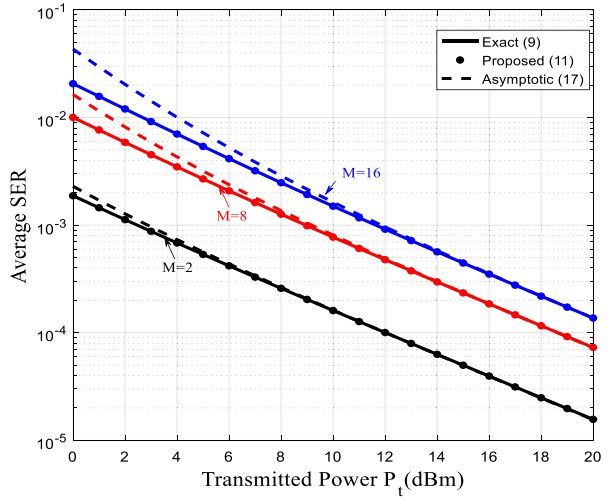
Impact of nonzero boresight and jitter pointing errors on the performance of M-ary ASK/FSO system over Málaga (M) atmospheric turbulence
In free-space optical (FSO) communication, Distribution models such as lognormal, gamma-gamma, and k-distribution describe weak, moderate, and strong turbulence, respectively. Whereas Málaga (M) distribution is a powerful statistical model repeatedly mentioned in the literature due to its generality, Málaga (M) describes the three turbulence conditions while considering the pointing errors, represented by the jitter boresight displacement, of the communication beam. Exact and closed-form expressions for symbol error rate and outage probability are presented in this paper—furthermore, cases
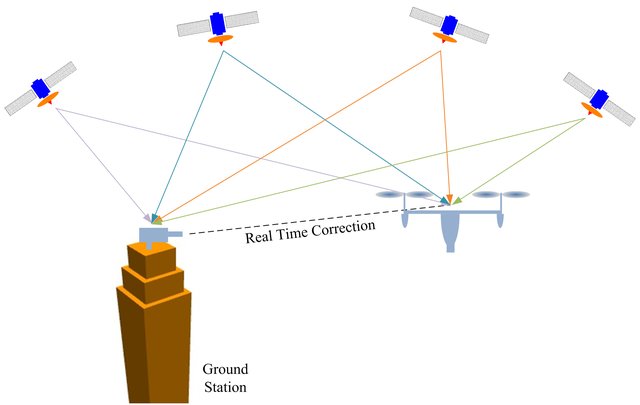
UAV Tracking System Using Integrated Sensor Fusion with RTK-GPS
Tracking Unmanned Aerial Vehicles (UAVs) is a significant surge in commercial or recreational use. The proposed tracking system is involved in determining the position and attitude angles of the UAVs in real-time. Data fusion of multiple sensors is one of the technologies used most in recent years and is based on real-time estimation of UAV's both position and attitude angles with high precision. In order to accomplish this objective, sensor fusion of an accelerometer, a gyroscope, a magnetometer, and a real-time kinematic global positioning system (RTK-GPS) sensors are implemented in this
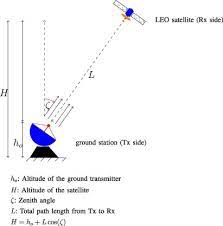
Enhancing earth-to-satellite FSO system spectrum efficiency with adaptive M-ary PSK and SIMO in presence of scintillation and beam wander
In this paper, the performance of the free-space optical (FSO) system from ground-to-satellite is analyzed considering the combined effect of atmospheric turbulence and beam wandering employing M-ary phase-shift keying (MPSK). Key parameters of the vertical connection, such as satellite altitude, zenith angle, and beam size, are investigated. In order to improve the spectrum efficiency, an adaptive transmission approach is applied to ensure efficient channel capacity usage. The procedure depends on changing the modulation order of the MPSK scheme according to the instantaneous channel state
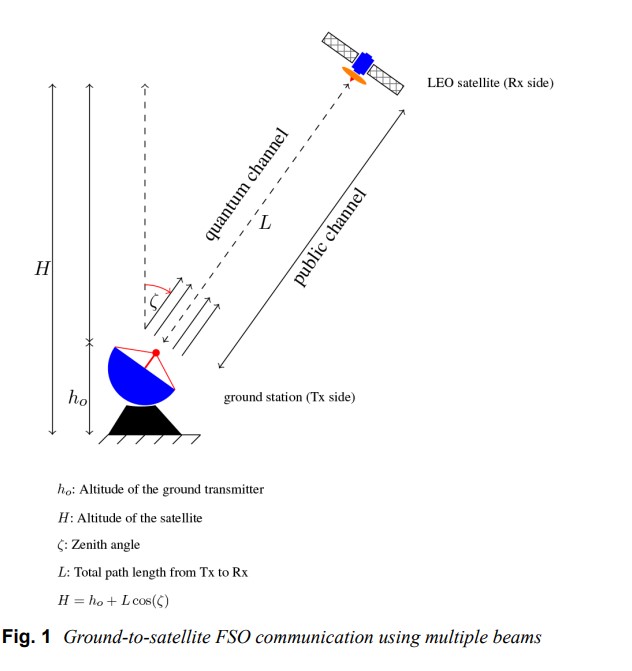
Performance evaluation and security analysis of ground-to-satellite FSO system with CVQKD protocol
This study evaluates the performance of a secure ground-to-satellite free-space optical (FSO) system using a bipolar pulse amplitude modulation over modulated gamma fading channel. A closed-form expression is derived for the joint probability of a satellite-based continuous-variable quantum key distribution (CV-QKD) protocol that uses dual-threshold detection. Furthermore, to study the system behaviour, closed-form expressions for quantum bit-error-rate (QBER) and quantum bitdiscard rate (QBDR) are given. The accuracy of the proposed derivations is validated using Monte-Carlo simulations and