
Chaotic properties of various types of hidden attractors in integer and fractional order domains
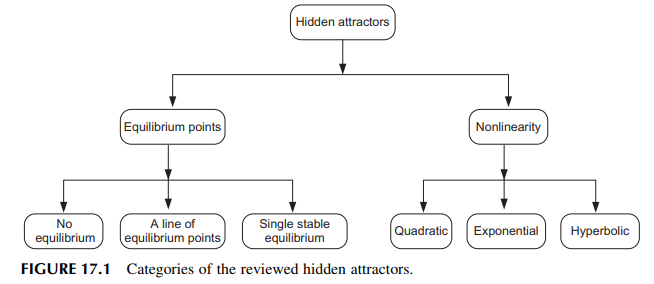
Nonlinear dynamical systems with chaotic attractors have many engineering applications such as dynamical models or pseudo-random number generators. Discovering systems with hidden attractors has recently received considerable attention because they can lead to unexpected responses to perturbations. In this chapter, several recent examples of hidden attractors, which are classified into several categories from two different viewpoints, are reviewed. From the viewpoint of the equilibrium type, they are classified into systems with no equilibria, with a line of equilibrium points, and with one
Two-dimensional front-tracking model for film evaporation
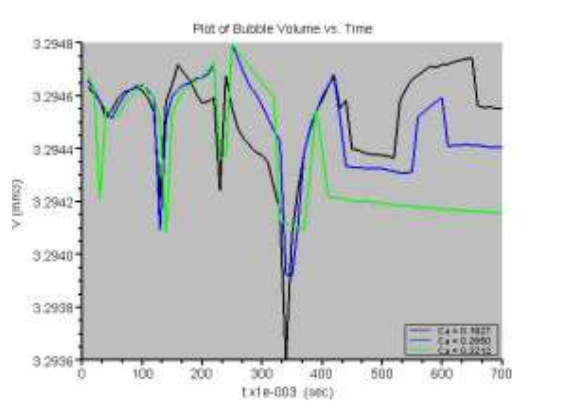
To understand the physical process involved in film evaporation, a new numerical model is created using coupled quadratic finite element formulation of the conservation equations. The heat transport equation is solved in the three different phases (solid, liquid and vapor) while the Navier-Stokes equation are solved in the two fluids. The gradient discontinuity at the liquid vapor interface provides local value of the evaporative flux density that is directly linked to the interface velocity jump through mass conservation principle and used as boundary condition for two fluid flow computations
Myocardial segmentation using constrained multi-seeded region growing
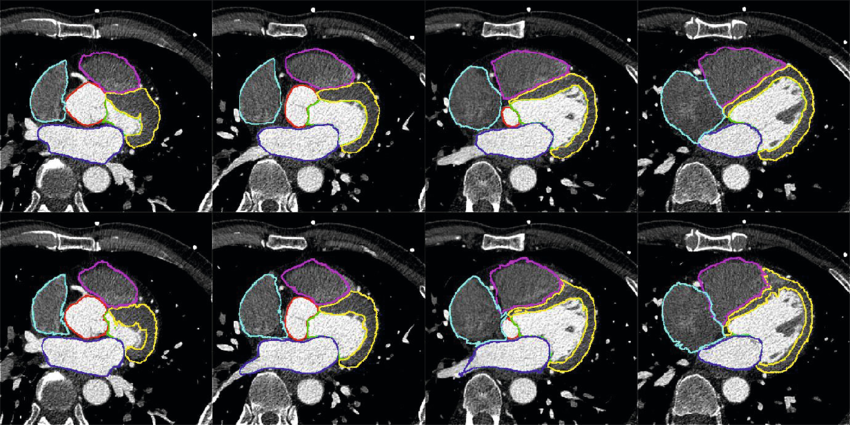
Multi-slice short-axis acquisitions of the left ventricle are fundamental for estimating the volume and mass of the left ventricle in cardiac MRI scans. Manual segmentation of the myocardium in all time frames per each cross-section is a cumbersome task. Therefore, automatic myocardium segmentation methods are essential for cardiac functional analysis. Region growing has been proposed to segment the myocardium. Although the technique is simple and fast, non uniform intensity and low-contrast interfaces of the myocardium are major challenges of the technique that limit its use in myocardial
Atmospheric pressure air microplasma current time series for true random bit generation
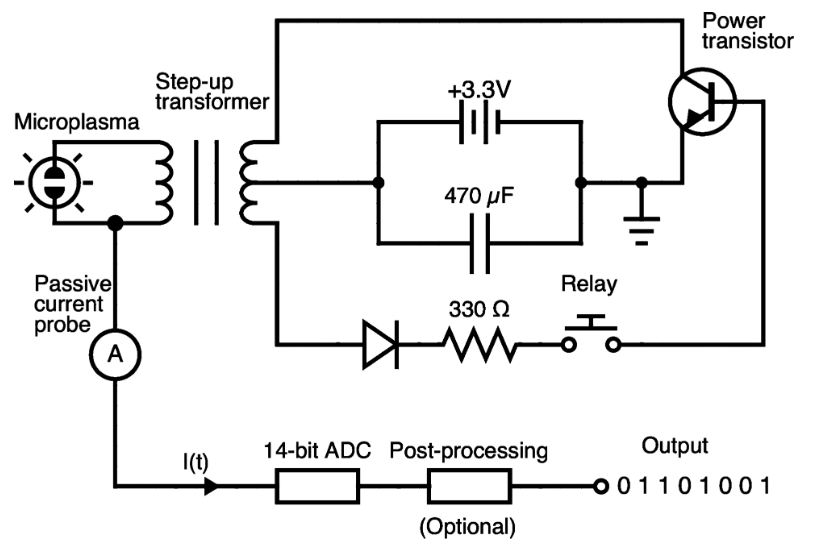
Generating true random bits of high quality at high data rates is usually viewed as a challenging task. To do so, physical sources of entropy with wide bandwidth are required which are able to provide truly random bits and not pseudorandom bits, as it is the case with deterministic algorithms and chaotic systems. In this work we demonstrate a reliable high-speed true random bit generator (TRBG) device based on the unpredictable electrical current time series of atmospheric pressure air microplasma (APAMP). After binarization of the sampled current time series, no further post-processing was
Design of low-voltage FO-[PD] controller for motion systems
Fractional-order controllers have gained significant research interest in various practical applications due to the additional degrees of freedom offered in their tuning process. The main contribution of this work is the analog implementation, for the first time in the literature, of a fractional-order controller with a transfer function that is not directly constructed from terms of the fractional-order Laplacian operator. This is achieved using Padé approximation, and the resulting integer-order transfer function is implemented using operational transconductance amplifiers as active elements
Fractional derivative modeling of double-diffusive free convection with von Neumann stability analysis
This paper focuses on the problem of fractional time derivative of fluid flow and convective heat and mass transfer from a heated semi-infinite wall immersed. We provided two cases of study, one is free convective heat transfer and the other is a free double-convective heat and mass transfer. The time-derivative terms in the equations of momentum, energy and concentration are assumed to be fractional using the Grunwald-Letnikov (GL) model. A finite difference scheme has been developed for each case of study and followed by a von Neumann stability analysis. Therefore, a stability condition has
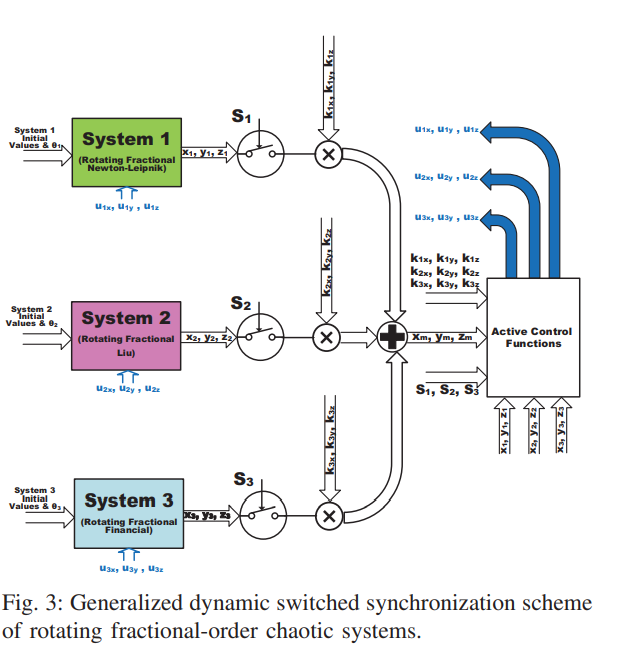
All-Dynamic Synchronization of Rotating Fractional-Order Chaotic Systems
This paper proposes generalized controllable strange attractors through dynamic rotation of fractional-order chaotic systems. Dynamic rotation angle enables the generation of multi-scroll and multi-wing attractors from single and double-scroll ones. The rotating systems are integrated with a generalized dynamic switched synchronization scheme. Dynamic control switches determine whether each system plays the role of master or slave. Based on dynamic scaling factors, the master can be one system or a combination of several ones with new strange attractors. The rotating fractional-order systems
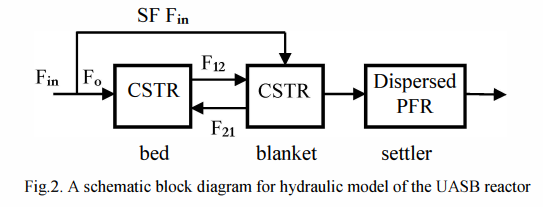
Mathematical modeling of Upflow Anaerobic Sludge Blanket reactor in domestic wastewater treatment
This paper introduces a dynamic model to adequately describe an Upflow Anaerobic Sludge Blanket (UASB) reactor. Some available models of a UASB reactor are discussed in order to modify their drawbacks and propose a new improved model with less complexity and more reliability. The developed model is a combination of two recent models introduced in Sweden. According to this model, a UASB rector is divided hydraulically into three compartments with integration of a kinetic model. Simulations are performed to investigate the validity of the developed model which indicates a good agreement with
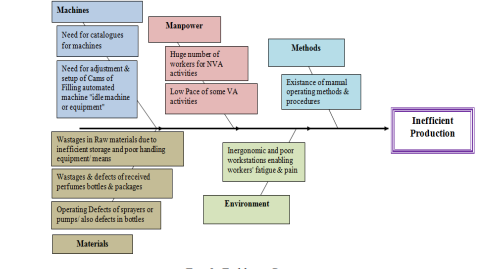
Improving Productivity of A Production Line in Perfumes Industry in Egypt Using Lean Manufacturing Methodology
This study presents proposed solutions for increasing the productivity of a production line in the perfumes industry in Egypt using lean manufacturing methodology. Enhancing efficiency is a major significant objective to consider in a typical manufacturing firm to improve the overall performance. Increasing productivity is achieved through applying an extensive lean program implementing appropriate lean tools to solve problems identified as wastage in materials and activities as well as bottlenecks increasing lead time. Information of current problems and gaps are gathered through visits and

Fabrication of bio-plastic composite pellets from agricultural waste and food waste
This study aims to produce starch bioplastic pellets from food waste such as potato peels. Measuring the ease of flow of the melt is crucial for producing these pellets. The melt flow index (MFI) is measured in this study to evaluate the consistency of the produced pellets and determine the extent of degradation of the plastic because of molding. This study investigates the effect of adding different fillers to the starch matrix on reducing the MFI value. The fillers used in this work are nano chitosan, nano potato peel, and micro cellulose fillers. The fillers were used with different