
Two-wheeled Self balancing robot Modeling and Control using Artificial Neural Networks (ANN)
This paper is focusing on the problem of the Self balancing robot which has many potentials due to its power consumption and maneuverability advantages. Modelling and controlling of the two-wheeled self-balancing robot is presented. For modelling part, two models were used in compare with a real proposed robot. At first, mathematical model was driven and the state space was achieved to model the plant of the system. Second, Nonlinear Autoregressive Exogenous (NARX) Neural Network model is introduced using recorded data architecture-based as it is used in time-series modeling for many reported
Fuzzy Logic Controller with Color Vision System Tracking for Mobile Manipulator Robot
The purpose of this article is to present a theoretical and practical implementation of a fuzzy algorithm methodology to control a mobile manipulator path planning using a real-time vision system tracking. To meet high performance response and robust stability of the platform navigation, a fuzzy logic controller is designed with realistic constrains. OpenCV library is used to implement Background Modeling technique to track in real time a color object and to extract its (X, Z) coordinates, then an ultrasonic sensor is coupled with the camera to calculate the depth “Y” of the tracked object
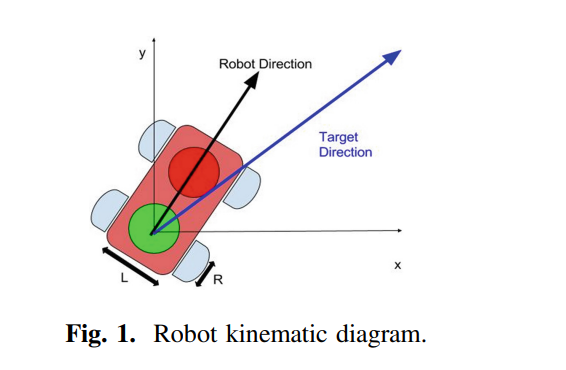
Design and Implementation of Fuzzy PID Controller into Multi Agent Smart Library System Prototype
This paper compares the performance of four different controllers implemented on two multi agent robots to stabilize its motion from one station to another during delivery tasks. The controllers are; multi-position controller, PID controller, fuzzy logic controller and fuzzy-PID controller. The aim of this paper is to control the mobile robot robustly to arrive its target destination. The robots and station coordinates are recognized using machine vision system and all programming is carried out in LabVIEW. The paper compares the transient response and steady state error of each of controller
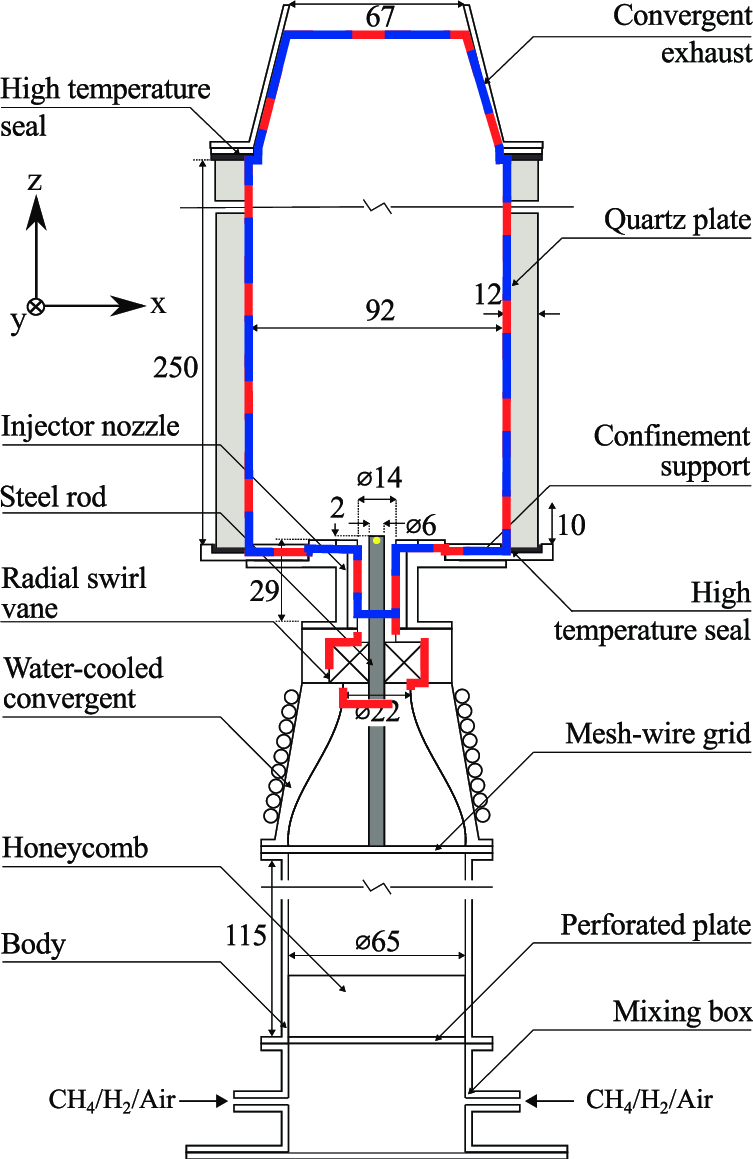
Effect of the wall thermal boundary condition on the structure of a confined swirling diffusion flame
The present study focuses on the effect of the wall heat loss on a confined swirling diffusion flame. The objective is to assess the effect of changing the wall thermal boundary condition (i.e., from isothermal to adiabatic) on the flow structure, the flame shape, and the mixing behavior. Reynolds-averaged Navier–Stokes equations are solved. The diffusion flamelet model is employed in the simulation. The comparison of the numerical and experimental axial wall heat flux distributions shows a good agreement. The inner recirculation zone (IRZ) is shorter in the case of the adiabatic wall. It
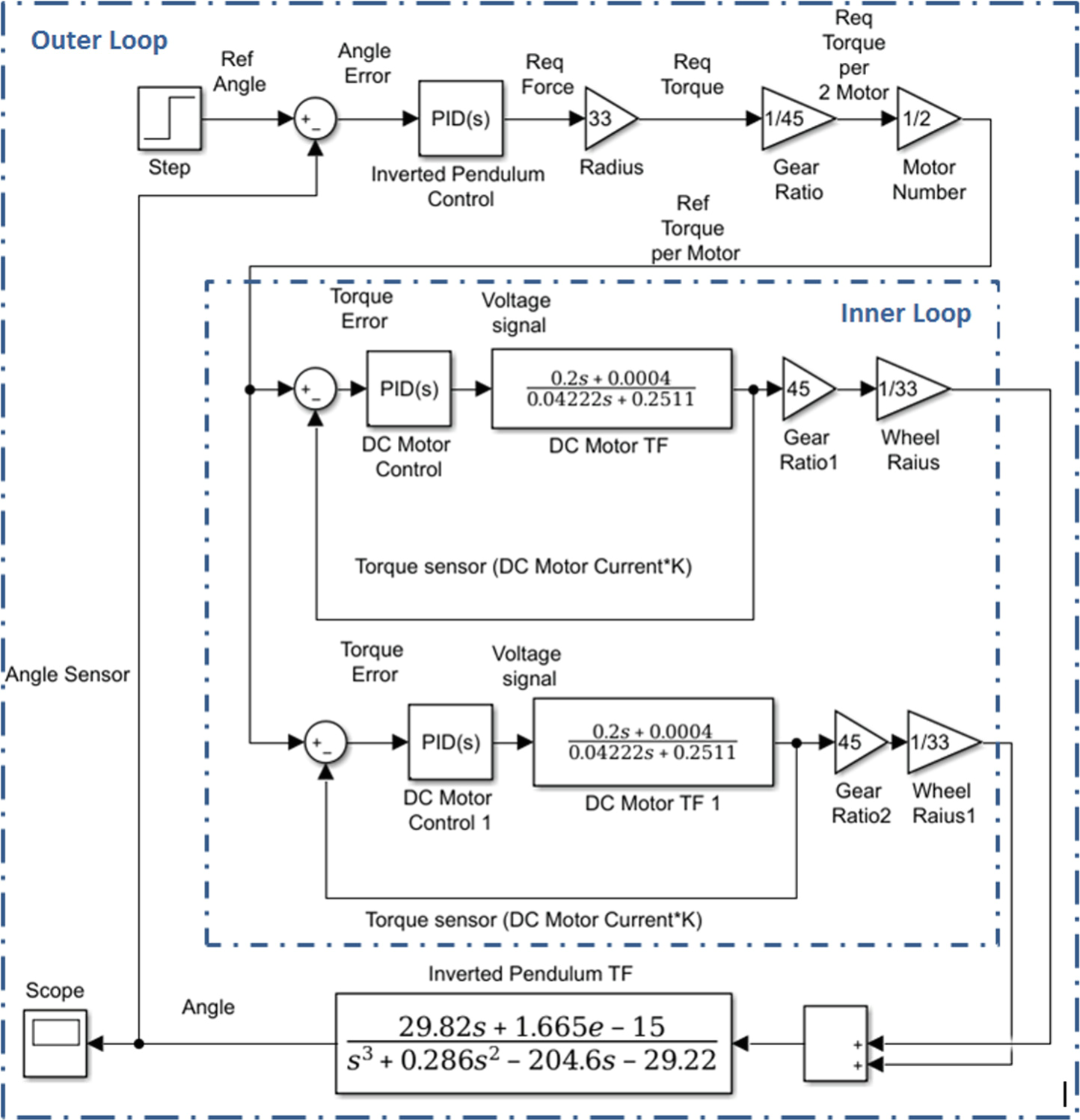
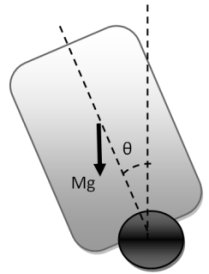
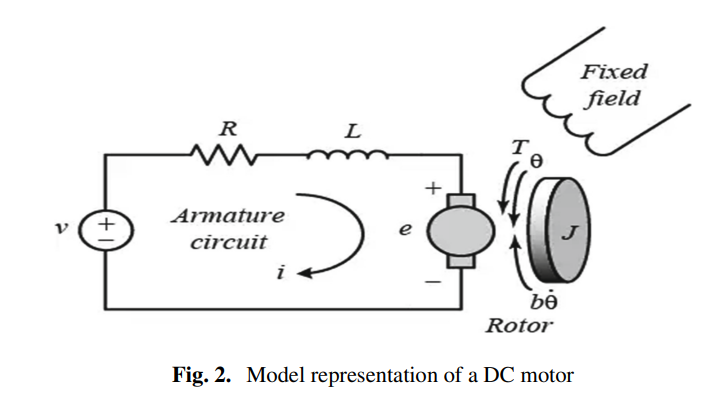
Self-balancing Robot Modeling and Control Using Two Degree of Freedom PID Controller
This paper represents the control of a two-wheel self-balancing robot based on the theory of controlling the inverted pendulum. This paper dividing the system modeling into two main parts. The first part is the dc motor and the second part are the whole mechanical design and its characteristics as a function in the motor speed and the torque depending on the system, creating two control closed loops inner and outer. The study uses conventional proportional–integral–derivative (PID) and two degree of freedom PID controllers to obtain a robust controller for the system. The inner loop controls
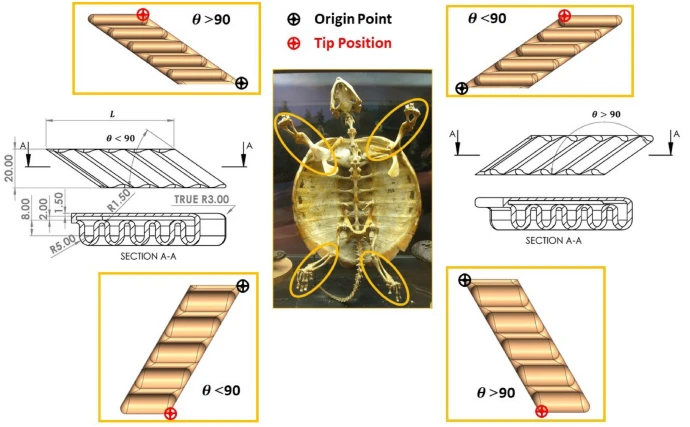
Modelling and implementation of soft bio-mimetic turtle using echo state network and soft pneumatic actuators
Advances of soft robotics enabled better mimicking of biological creatures and closer realization of animals’ motion in the robotics field. The biological creature’s movement has morphology and flexibility that is problematic deportation to a bio-inspired robot. This paper aims to study the ability to mimic turtle motion using a soft pneumatic actuator (SPA) as a turtle flipper limb. SPA’s behavior is simulated using finite element analysis to design turtle flipper at 22 different geometrical configurations, and the simulations are conducted on a large pressure range (0.11–0.4 Mpa). The
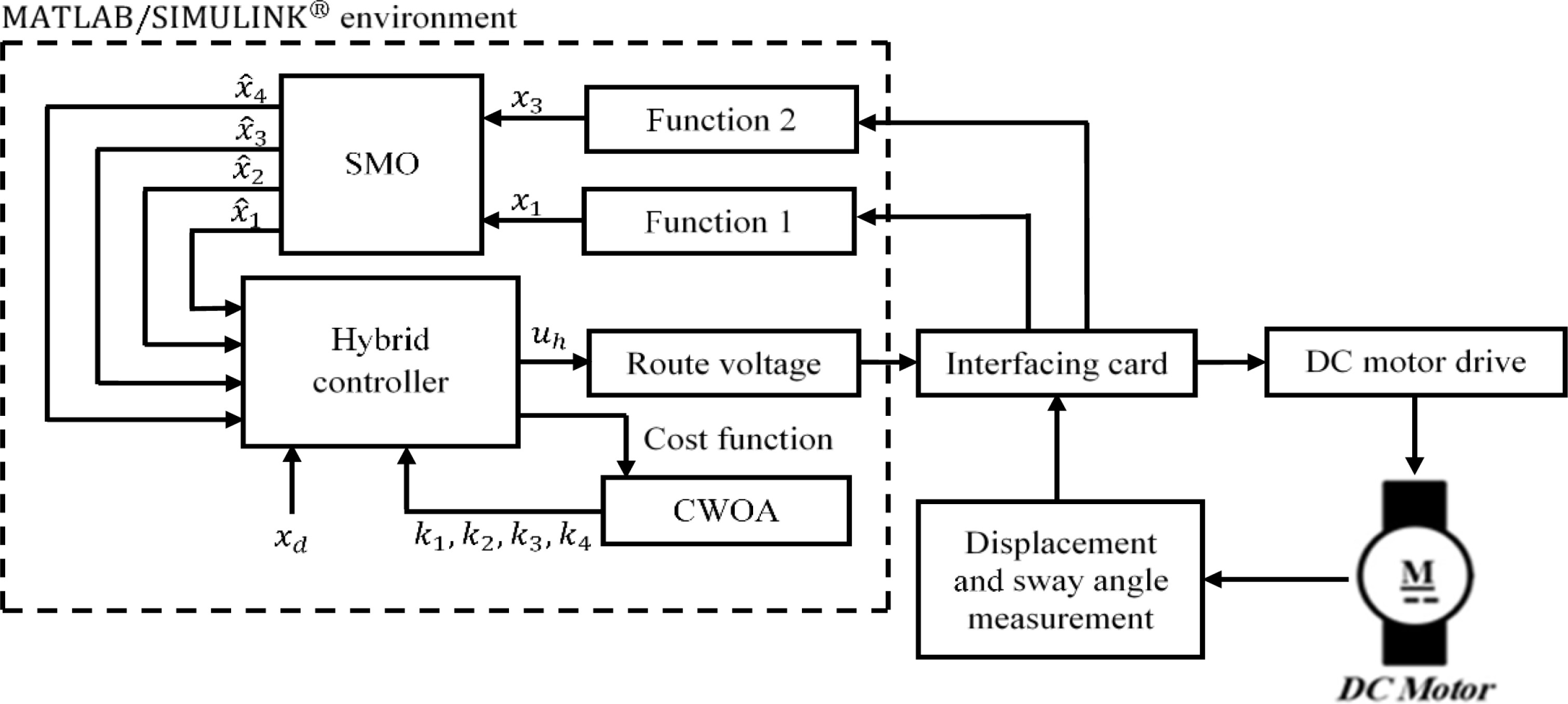
Experimental verification of a hybrid control scheme with chaotic whale optimization algorithm for nonlinear gantry crane: A comparative study
This paper proposes an experimental verification of a hybrid partial feedback linearization (PFL) and deadbeat (DB) control scheme as in Hamdy et al. (2018) with chaotic whale optimization algorithm (CWOA) for a nonlinear gantry crane (GC) system. The PFL linearizes the nonlinear model to end up with a linear closed-loop system. The DB controller is utilized for the desirable accelerated response without any oscillation or undesirable effects on the internal dynamics stability. The CWOA is used to tune the controller parameters. A sliding-mode observer (SMO) is utilized to estimate the

Experimental Modeling of Hexapod Robot Using Artificial Intelligence
Hexapod Robots gave us the opportunity to study walking robots without facing problems such as stability and expensive custom made hardware. It has a great deal of flexibility in moving over different terrains even if some legs become malfunctioned or facing some difficulties in movement. In this study the kinematic analysis of CH3-R 18DOF Hexapod Robot is discussed where each leg contains three revolute joints in order to mimic the structure of a spider. To develop the overall kinematic model of CH3-R robot, direct and inverse kinematic analyses for each leg have been considered where the
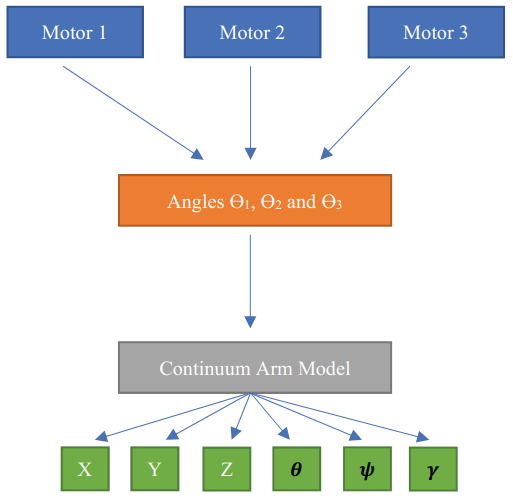
Modelling of Continuum Robotic Arm Using Artificial Neural Network (ANN)
Continuum robotic arm becomes the new area of scientific research nowadays. Its technology has grown and touched several vital applications included industry and agriculture thanks to many advantages made it a better choice than the conventional serial robotic manipulator. This paper represents a new designed model of continuum arm robot, which relates the motor shaft angle as the input parameter and transfers the motor torque to combined system of compression springs and results in six outputs: x,y and z 3D coordinates for the center point of the end effector and \theta,~\psi and \gamma to
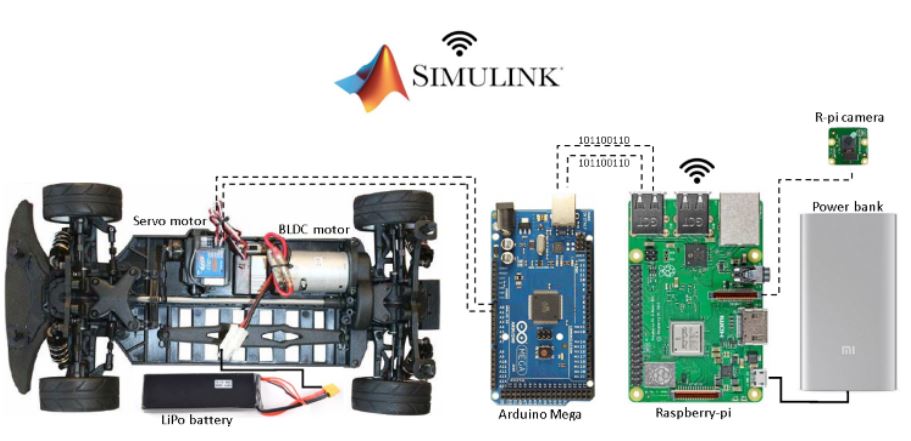
Experimental Lane Keeping Assist for an Autonomous Vehicle Based on Optimal PID Controller
Detection of the lane boundary is the primary task in order to control the trajectory of an autonomous car. In this paper, three methodologies for lane detection are discussed with experimental illustration: Blob analysis, Hough transformation and Birds eye view. The next task after receiving the boundary points is to apply a control law in order to trigger the steering and velocity control to the motors efficiently. In the following, a comparative analysis is made between different tuning criteria to tune PID controller for Lane Keeping Assist (LKA). In order to receive the information of the