
Light-Weight Localization and Scale-Independent Multi-gate UNET Segmentation of Left and Right Ventricles in MRI Images
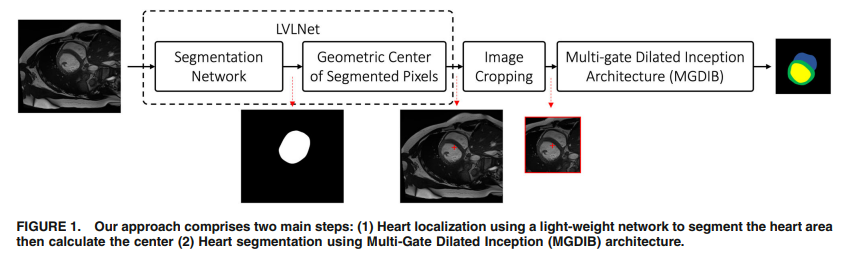
Purpose: Heart segmentation in cardiac magnetic resonance images is heavily used during the assessment of left ventricle global function. Automation of the segmentation is crucial to standardize the analysis. This study aims at developing a CNN-based framework to aid the clinical measurements of the left ventricle and right ventricle in cardiac magnetic resonance images. Methods: We propose a fully automated framework for localization and segmentation of the left ventricle and right ventricle in both short- and long-axis views from cardiac magnetic resonance images. The localization module
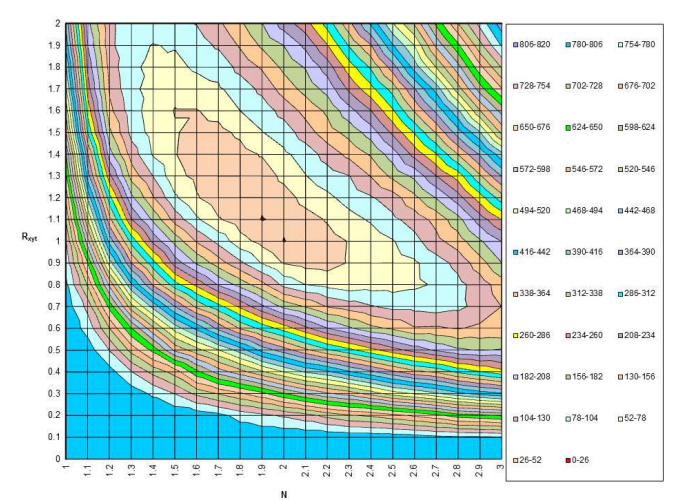
Automated classification technique for edge-on galaxies based on mathematical treatment of brightness data
Classification of edge-on galaxies is important to astronomical studies due to our Milky Way galaxy being an edge-on galaxy. Edge-on galaxies pose a problem to classification due to their less overall brightness levels and smaller numbers of pixels. In the current work, a novel technique for the classification of edge-on galaxies has been developed. This technique is based on the mathematical treatment of galaxy brightness data from their images. A special treatment for galaxies' brightness data is developed to enhance faint galaxies and eliminate adverse effects of high brightness backgrounds
Fault-Recovery and Robust Deadlock Control of Reconfigurable Multi-Unit Resource Allocation Systems Using Siphons
A multi-unit resource allocation system usually contains several processes and a number of resources with multiple units. Due to the competition for shared resources in these systems, deadlocks may occur. Recently, researchers have shown an increased awareness in deadlock control strategies for such a kind of systems without considering the dynamic changes such as processing failures and rework by using the Petri net paradigm. This article reports a new strategy for deadlock analysis and control in reconfigurable multi-unit resource systems (MRSs). We discuss a generalized class of Petri nets
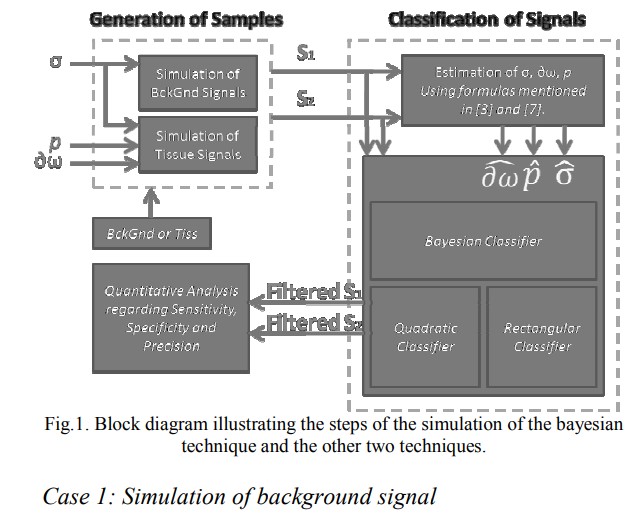
Performance evaluation of cardiac MRI image denoising techniques
Black-blood cardiac Magnetic Resonance Imaging (MRI) plays an important role in diagnosing a number of heart diseases. The technique suffers inherently from low contrast-tonoise ratio between the myocardium and the blood. In this work, we examined the performance of different classification techniques that can be used. The three techniques successfully removed the noise with different performance. Numerical simulation has been done to quantitatively evaluate the performance of each technique. © 2008 IEEE.
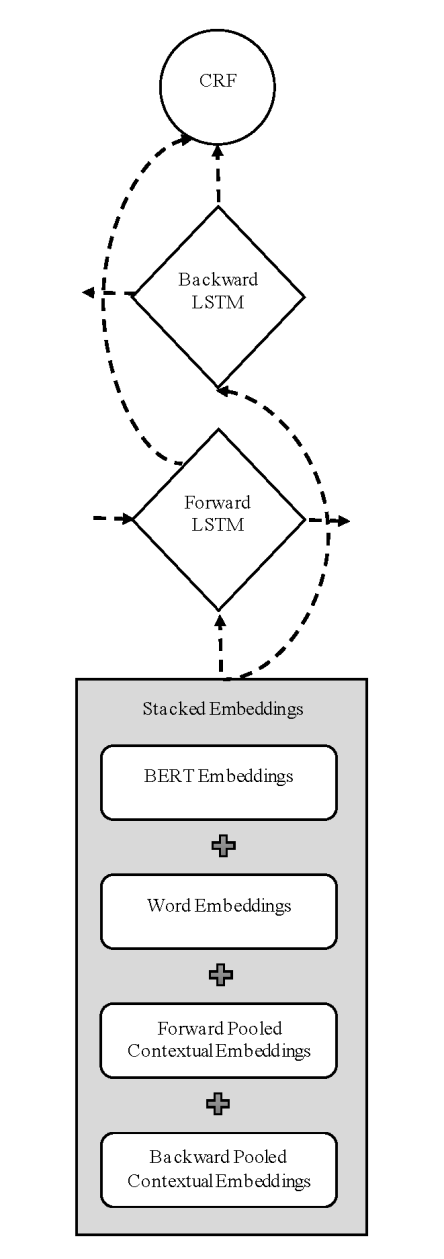
A Multi-Embeddings Approach Coupled with Deep Learning for Arabic Named Entity Recognition
Named Entity Recognition (NER) is an important task in many natural language processing applications. There are several studies that have focused on NER for the English language. However, there are some limitations when applying the current methodologies directly on the Arabic language text. Recent studies have shown the effectiveness of pooled contextual embedding representations and significant improvements in English NER tasks. This work investigates the performance of pooled contextual embeddings and bidirectional encoder representations from Transformers (BERT) model when used for NER on
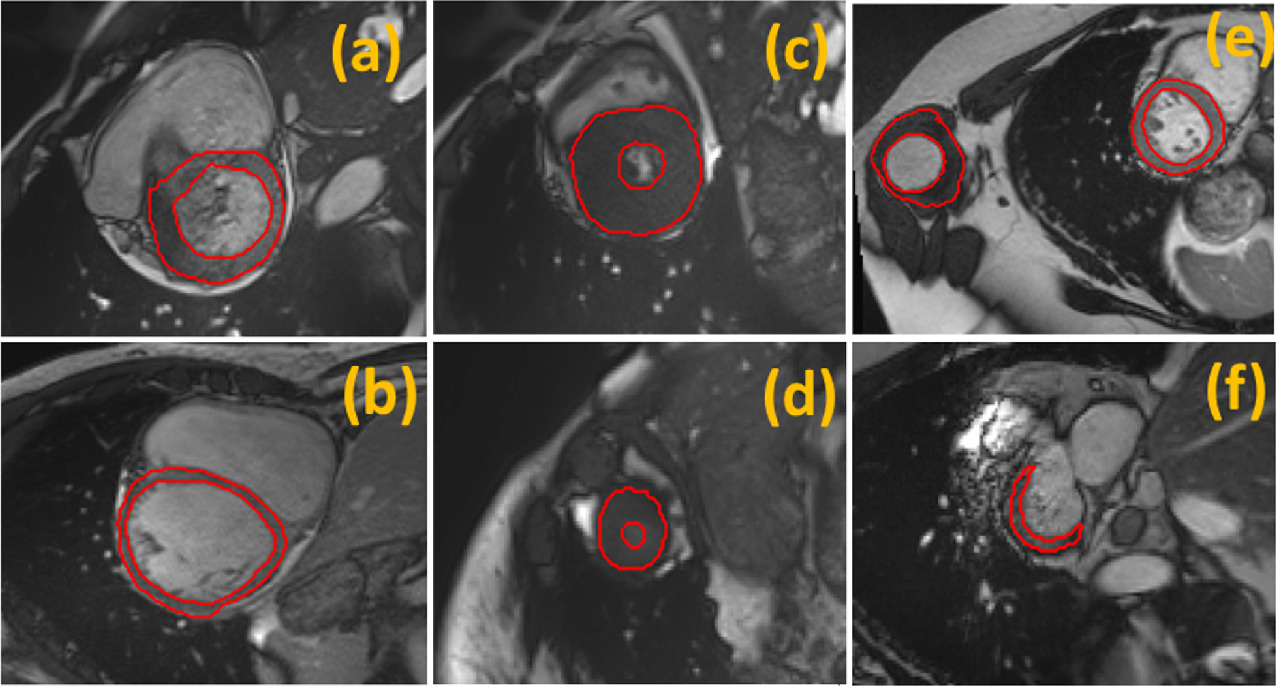
Left ventricle segmentation using scale-independent multi-gate unet in mri images
Left ventricle (LV) segmentation is crucial to assess left ventricle global function. U-Net; a Convolutional Neural Network (CNN); boosted the performance of many biomedical image segmentation tasks. In LV segmentation, U-Net suffered from accurately extracting small objects such as the apical short-axis slices. In this paper, we propose a fully automated left ventricle segmentation method for both short-axis and long-axis views. The proposed model utilizes U-Net architecture and Multi-Gate input block to enhance the performance by aggregating multi-scale features and adding different vision
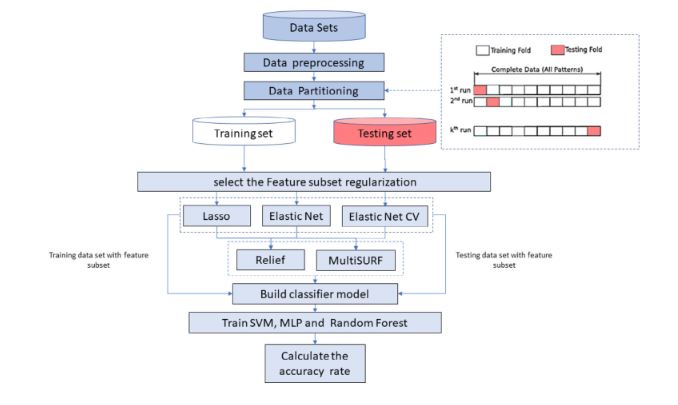
Hybrid feature selection model based on relief-based algorithms and regulizer algorithms for cancer classification
Cancer is a group of diseases that involve abnormal cell growth with the potential to spread to other parts of the body. Cancer microarray data usually include a small number of samples with a large number of gene expression levels as features. Gene expression or microarray is a technology that monitors the expression of the large number of genes in parallel that make it useful in cancer classification, high dimensionality in cancer microarray data results in the overfitting problem. This article proposes novel hybrid feature selection model called the RBARegulizer model, which is based on two
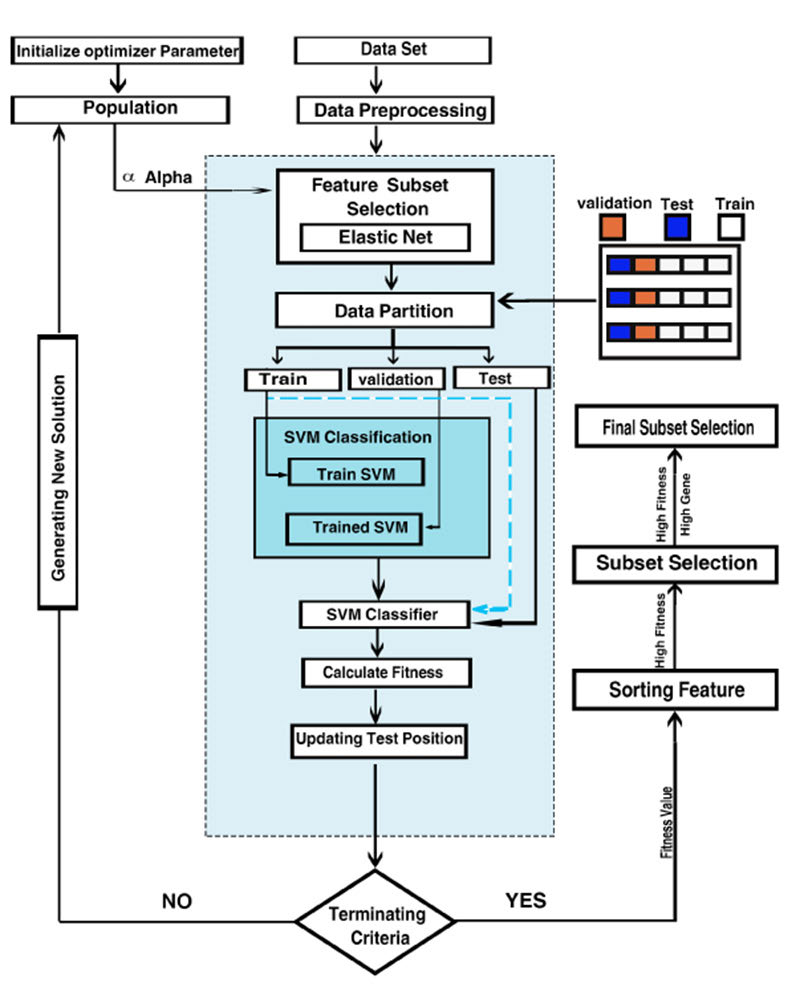
A Hybrid Feature Selection Optimization Model for High Dimension Data Classification
Feature selection is an NP-hard combinatorial problem, in which the number of possible feature subsets increases exponentially with the number of features. In the case of large dimensionality, the goal of feature selection is to determine the smallest possible features considering the most informative subset. In this paper, we proposed a hybrid feature selection optimization model for Cancer Classification called, ENSVM. Our model is based on using the Elastic Net (EN) method that regulates and selects variables for gene selection of genomic microarray data. We applied three different
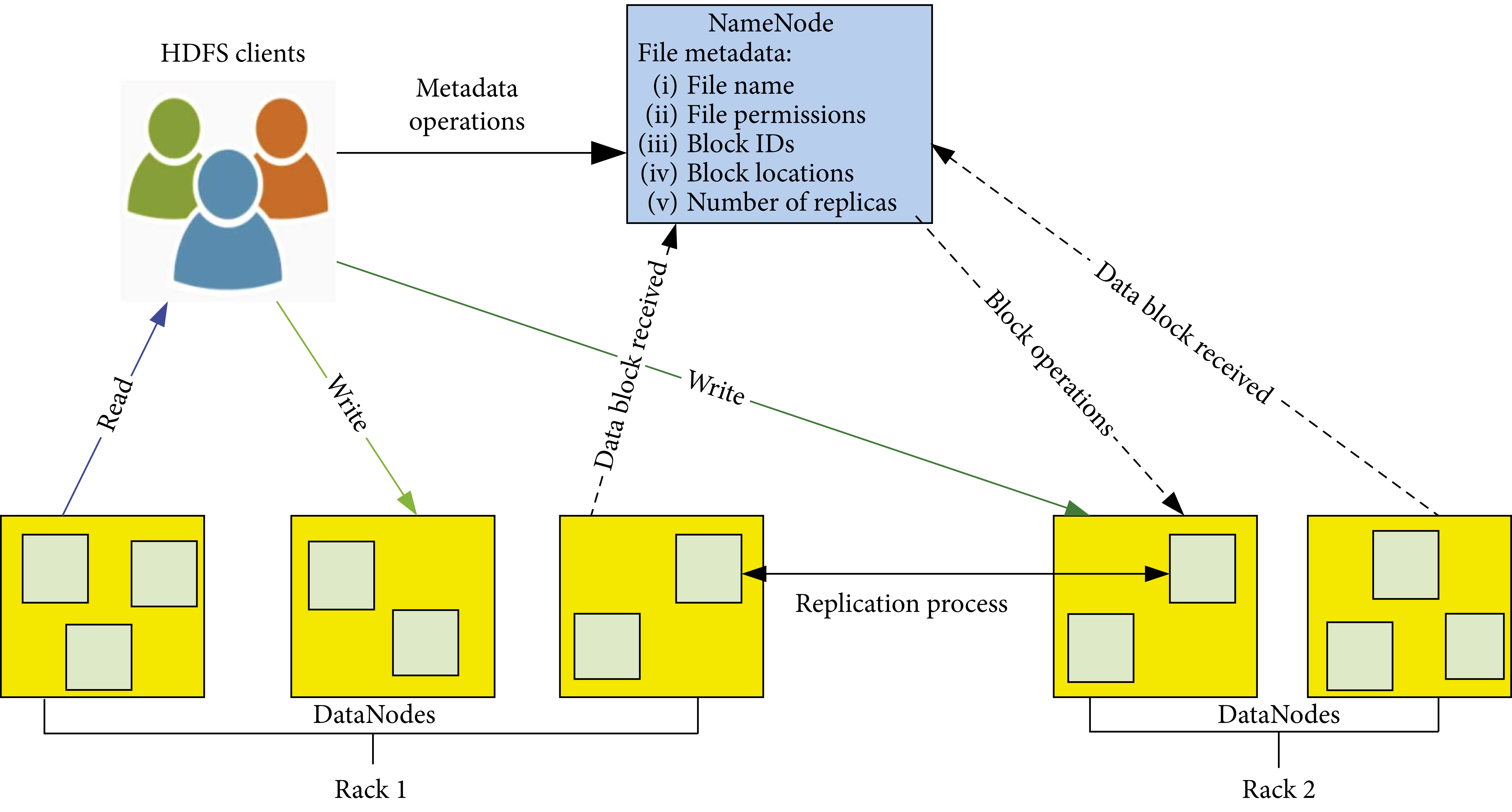
A Novel Hadoop Security Model for Addressing Malicious Collusive Workers
With the daily increase of data production and collection, Hadoop is a platform for processing big data on a distributed system. A master node globally manages running jobs, whereas worker nodes process partitions of the data locally. Hadoop uses MapReduce as an effective computing model. However, Hadoop experiences a high level of security vulnerability over hybrid and public clouds. Specially, several workers can fake results without actually processing their portions of the data. Several redundancy-based approaches have been proposed to counteract this risk. A replication mechanism is used
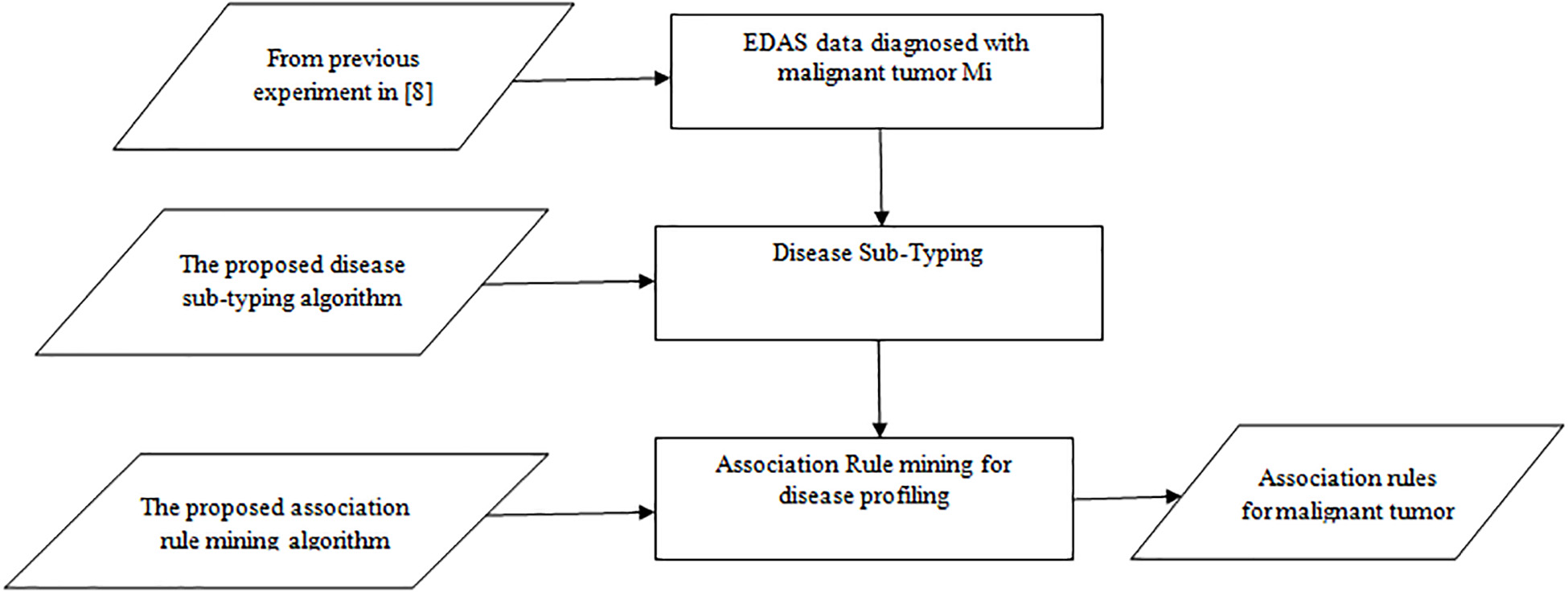
A Theoretical Approach for Correlating Proteins to Malignant Diseases
Malignant Tumors are developed over several years due to unknown biological factors. These biological factors induce changes in the body and consequently, they lead to Malignant Tumors. Some habits and behaviors initiate these biological factors. In effect, the immune system cannot recognize a Malignant Tumor as foreign tissue. In order to discover a fascinating pattern of these habits, behaviors, and diseases and to make effective decisions, different machine learning techniques should be used. This research attempts to find the association between normal proteins (environmental factors) and