
Synergism between Saccharomyces cerevisiae probiotic and rosemary nano-emulsion: Effect on broiler chicken meat quality and shelf life
Although several studies have investigated the effect of either probiotic feed additives or postmortem meat treatment on the quality of obtained chicken meat, the impact of combined treatment with probiotic feed additives along with meat dipping in essential oil nano-emulsion on meat shelf-life is barely examined. There-fore, this study investigated the effect of combined treatment with Saccharomyces cerevisiae yeast (SCY) and rosemary oil nano-emulsion (RNE) on the quality and shelf-life of chilled broiler meat. The experimental part consisted of adding SCY as a feed additive to broiler
Correction to: Identification of TIMPs signatures in Randall plaque from single-cell RNA sequencing (scRNA-Seq) analysis (Functional & Integrative Genomics, (2024), 24, 1, (11), 10.1007/s10142-024-01296-0)
The original article contains an error. Abstract has been removed during processing. This is now added here. Background Tissue inhibitors of metalloproteinases (TIMPs) are essential for controlling the dynamics of the extracellular matrix. Although their role in vascular diseases like as atherosclerosis and plaque development has been widely researched, the specific patterns of their expression and their functional significance inside Randall plaque tissues, a distinct vascular pathology linked to nephrolithiasis, have not been well investigated. Objectives The objective of this work was to
Morphogenetic characterization of Stenotrophomonas maltophilia infecting white stripe disease of rice (Oryza sativa L.)
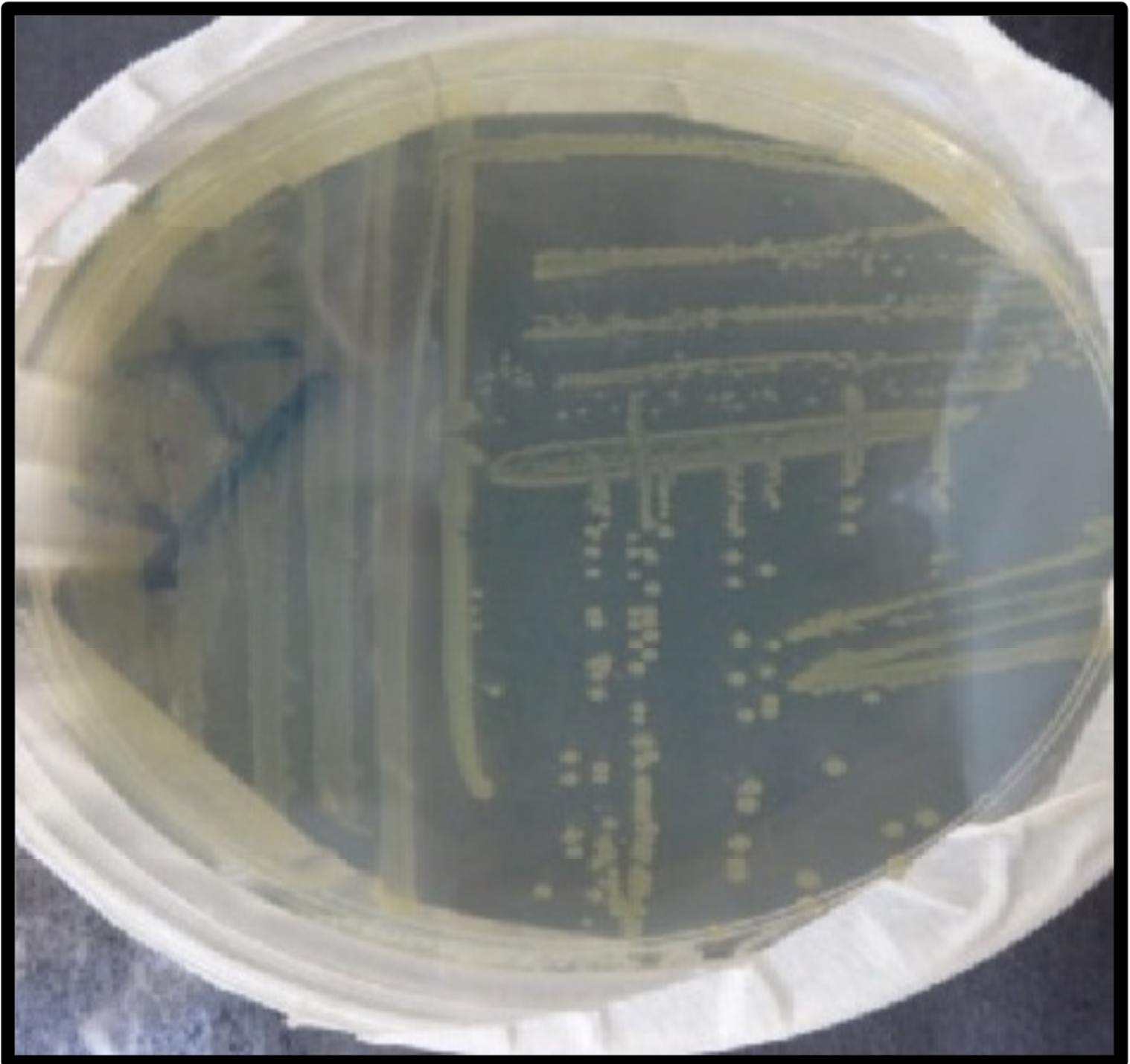
Rice is a major cereal crop which ensure food security to more than half of the global population. Several biotic factors impact rice grain quality and its final production. White stripe disease, caused by pathogen Stenotrophomonas maltophilia is considered among the major limiting factor for reducing rice yields and quality. Present study was performed to understand the white stripe disease, which has been frequently misdiagnosed as bacterial leaf blight (BLB) due to similar symptoms. A survey was carried out based on accessibility and farmer participation to monitor incidence and sample
Identification and expression analysis of SBP-Box-like (SPL) gene family disclose their contribution to abiotic stress and flower budding in pigeon pea (Cajanus cajan)
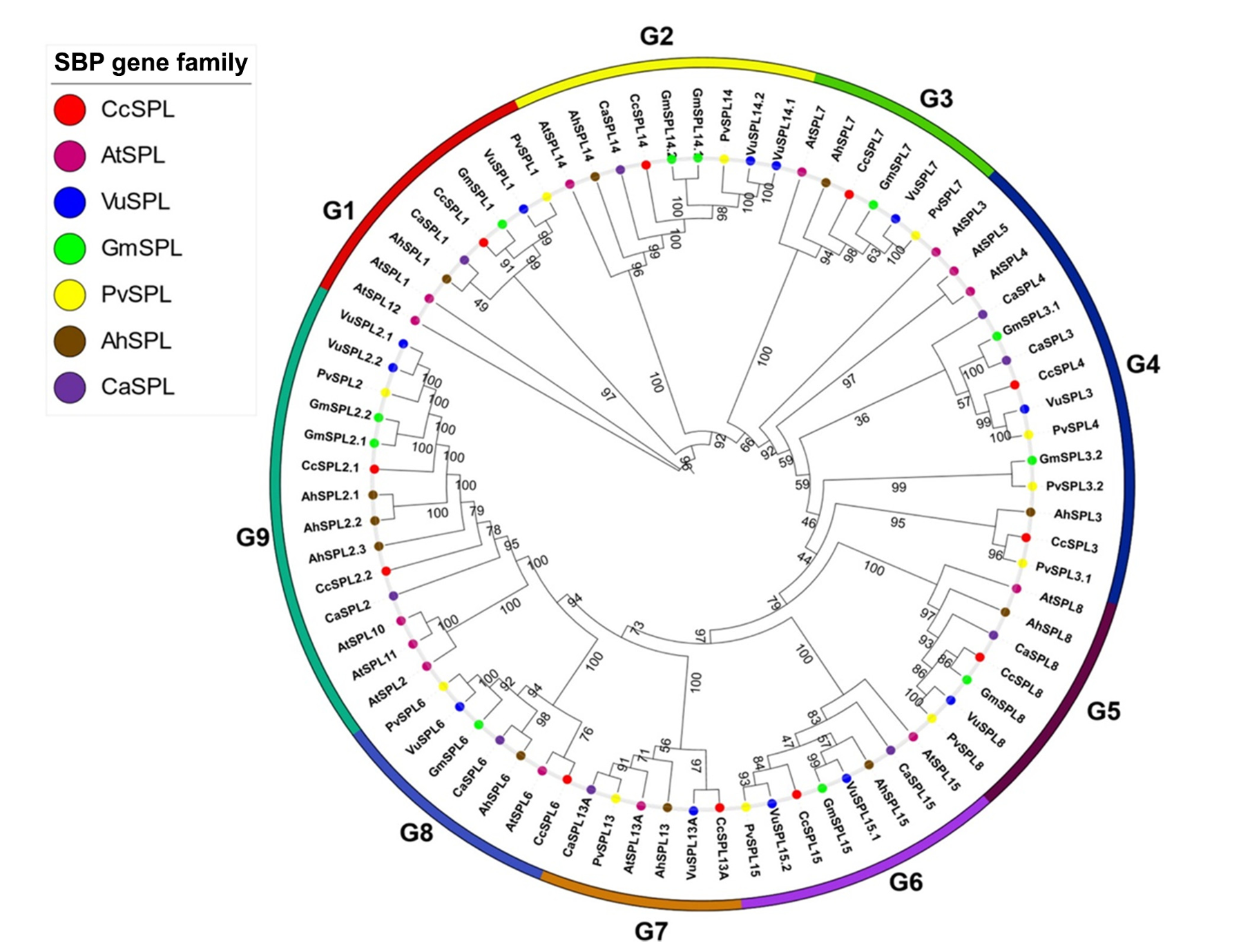
The SPL gene family (for Squamosa Promoter-binding like Proteins) represents specific transcription factors that have significant roles in abiotic stress tolerance, development and the growth processes of different plants, including initiation of the leaf, branching and development of shoot and fruits. The SPL gene family has been studied in different plant species; however, its role is not yet fully explored in pigeon pea (Cajanus cajan). In the present study, 11 members of the CcSPL gene family were identified in C. cajan. The identified SPLs were classified into nine groups based on a

Gamma radiation reduces the levels of aflatoxins B1 in poultry meat, skin, and liver
Aflatoxins are one of the most dangerous toxic residues in various foods including poultry. This study was conducted to assess the reducing effect of gamma radiation on the levels of aflatoxin B1 in poultry meat, skin, and liver. To this end, a total of 80 poultry samples including meat, skin, and liver were surveyed for the incidence of aflatoxins, where only positive samples (27 samples of muscle, skin, and liver; 9 samples each) were selected for testing the effect of treatment by gamma radiation. The levels of aflatoxins were estimated in the examined samples using High Performance Liquid
The Melody of Silent Mutations: Microbiome Adaptation Across the Subduction Zone
Silent mutations generate synonymous codons that encode the same amino acid however, they may be silent yet operative. These synonymous codons are used in unequal frequencies resulting in a phenomenon known as codon usage bias (CUB). It drives gene expression towards highly expressed and adaptation genes. In this study we investigated CUB in one of the largest, most dynamic exotic niches, the volcanic subduction zones in Costa Rica. CUB analysis in such challengingly inaccessible sites can help distinguish highly expressed genes under certain environmental factors, elucidating molecular

In silico analysis of the structural and functional characterization of the phosphorus-starvation tolerance 1 (PSTOL1) gene
As an important macro element for all living cells, phosphorus is essential in agricultural production systems and is required in large quantities by elite varieties of crops to maintain yields. Approximately 70% of the worldwide cultivated land suffers from phosphorous deficiency, and it has recently been estimated that the worldwide phosphorous resources will be shattered by the end of this century, thereby increasing the need to develop phosphorus-efficient crops. A greater understanding of how plants can maintain yield with lower phosphorous availability is highly desirable to both
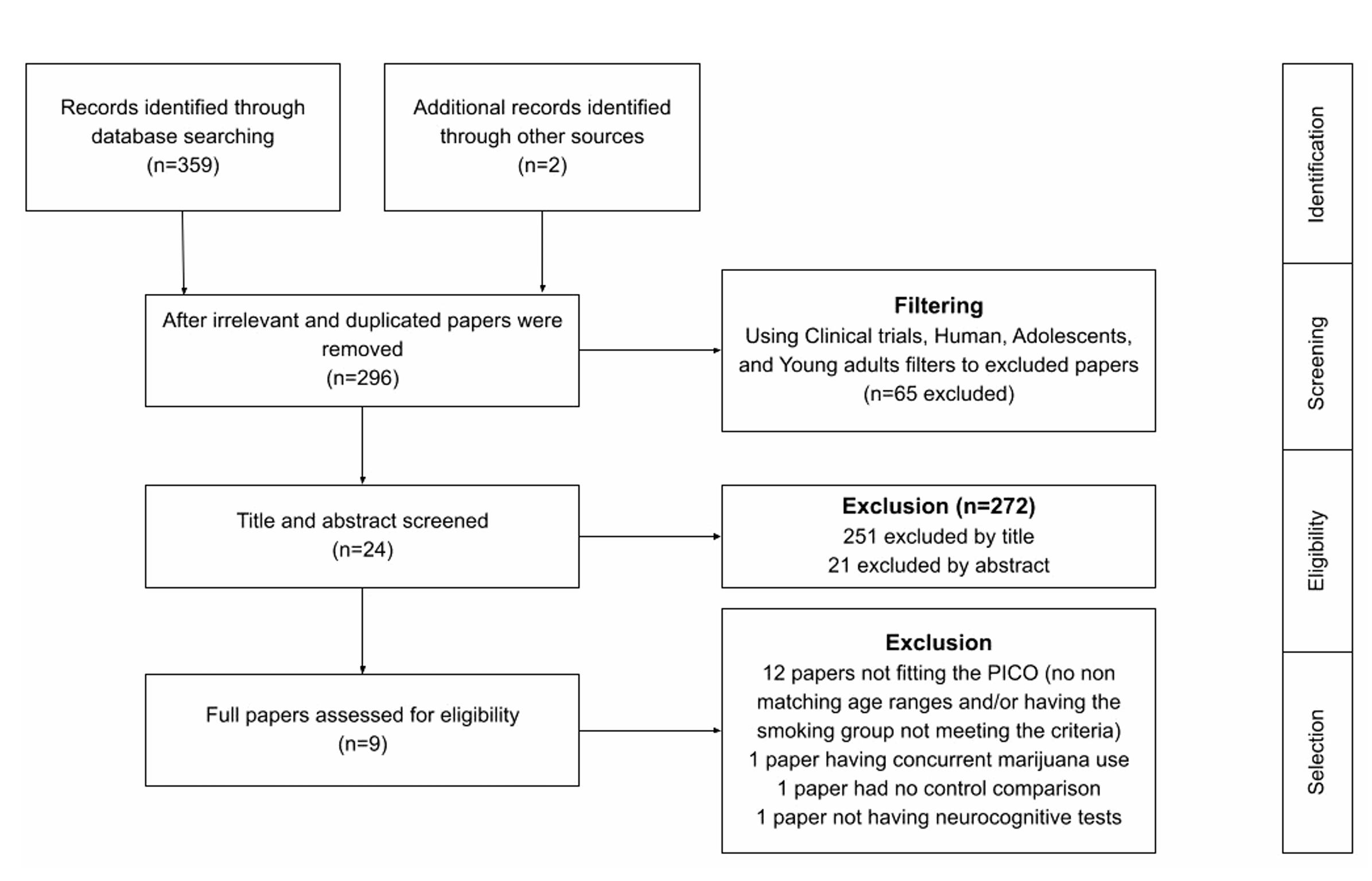
Chronic tobacco smoking and neurocognitive impairments in adolescents and young adults: a systematic review and meta-analysis
There is a lack of robust research investigating the association between neurocognitive impairments and chronic tobacco smoking in adolescents/young adults. Therefore, a systematic review and meta-analysis were conducted to examine this association by pooling cross-sectional studies published from 1980 to 2023. The systematic review assessed the neurocognitive performances between chronic tobacco smokers and non-smokers in each study. The meta-analysis included six studies that compared chronic tobacco smokers against non-smokers using neuropsychological tests covering three neurocognitive
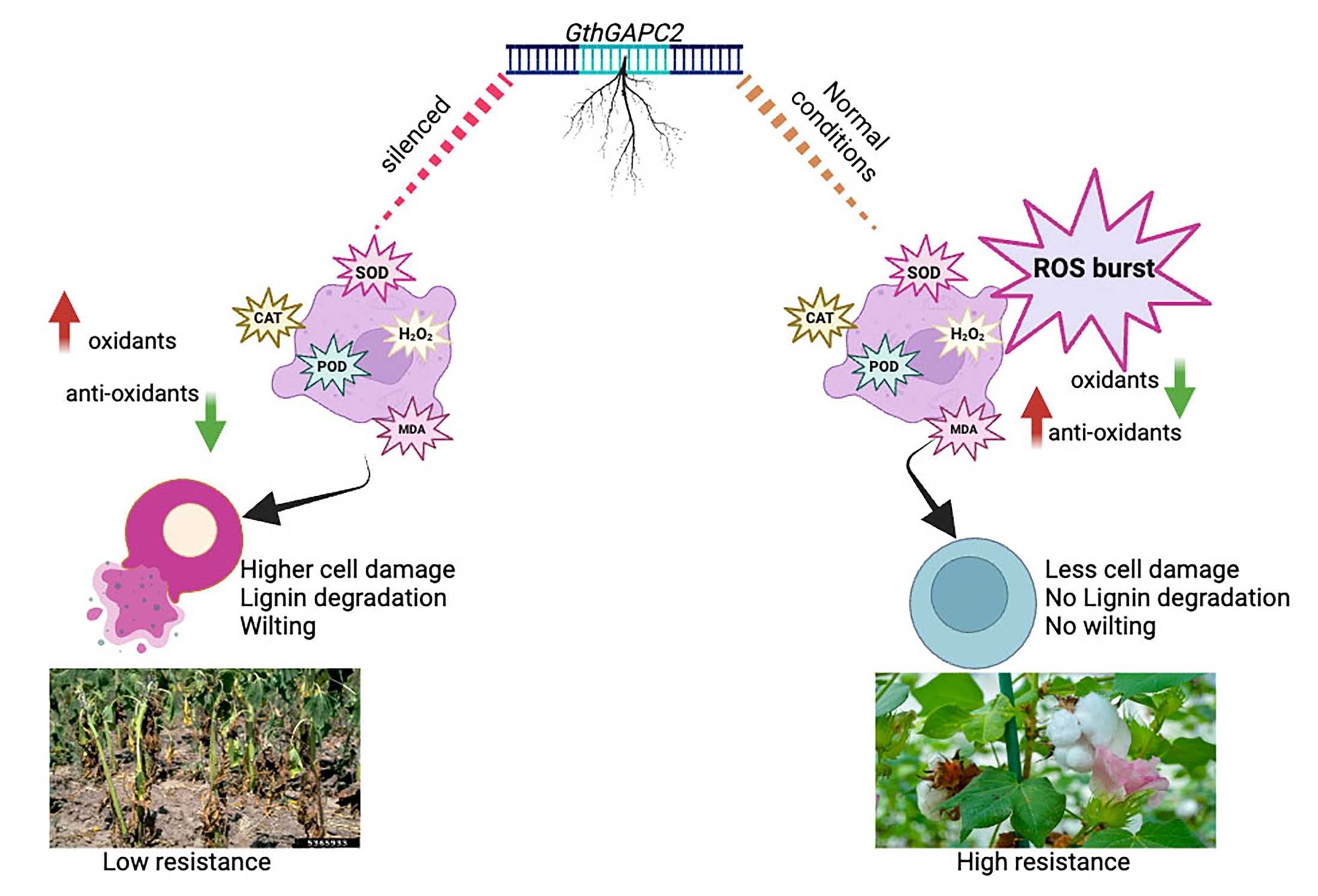
Unravelling the Functional Role of GthGAPC2 in Cotton's Defense Against Verticillium dahliae through Proteome
Cotton (Gossypium spp.) is an economically important crop, but its productivity is often hindered by the soil-borne pathogen Verticillium dahliae. This study aimed to investigate the response of cotton roots to V. dahliae infection by analysing the proteome of Gossypium thurberi (resistant) and Gossypium raimondii (susceptible) at 0 h, 24 h, and 48 h post-infection. Through weighted protein coexpression network analysis, fifteen hub proteins crucial for defense against V. dahliae were identified. Expression analysis revealed the pivotal role of GthGAPC2, encoding GLYCERALDEHYDE-3-PHOSPHATE
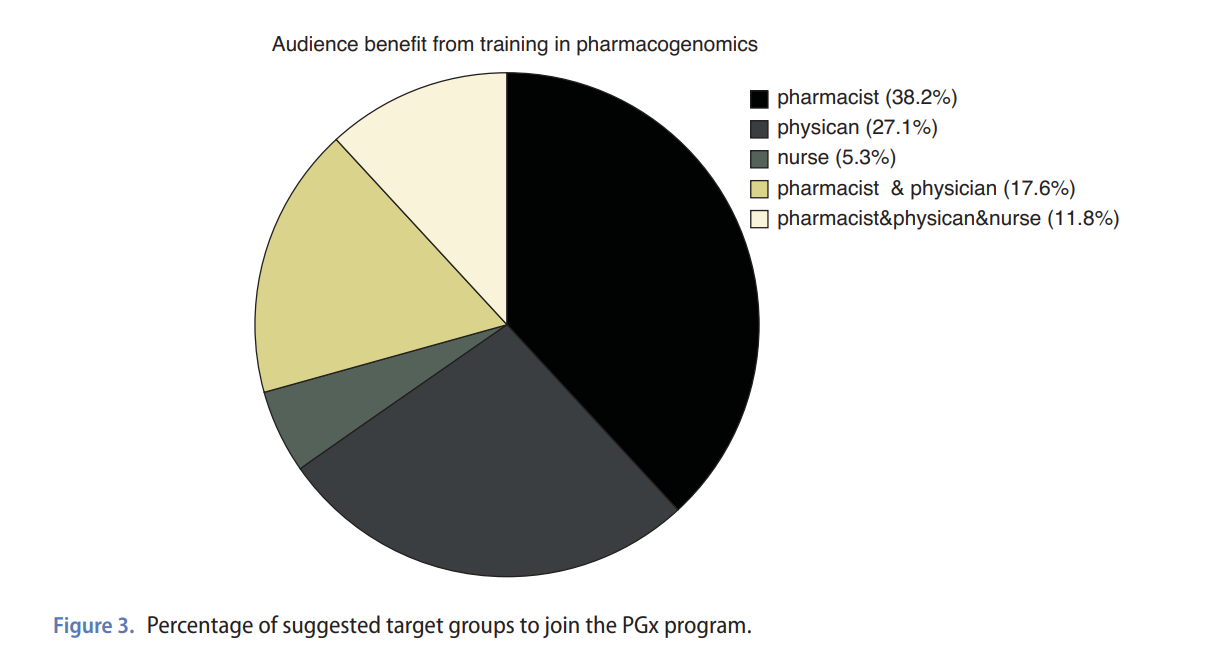
Analysis of the current situation of pharmacogenomics in terms of educational and healthcare needs in Egypt and Lebanon
Pharmacogenomics (PGx) is a practice that investigates the link between genetic differences and drug response in patients. This can improve treatment effectiveness and reduce harmful side effects. However, has yet to be adequately realized in developing nations. Three surveys were conducted between November 2022 to March 2023 in Egypt and Lebanon. The first survey assessed availability of PGx testing in different healthcare facilities; the second one assessed knowledge, interest and attitude toward learning about PGx among pharmacists and physicians; and the third one assessed interest in