
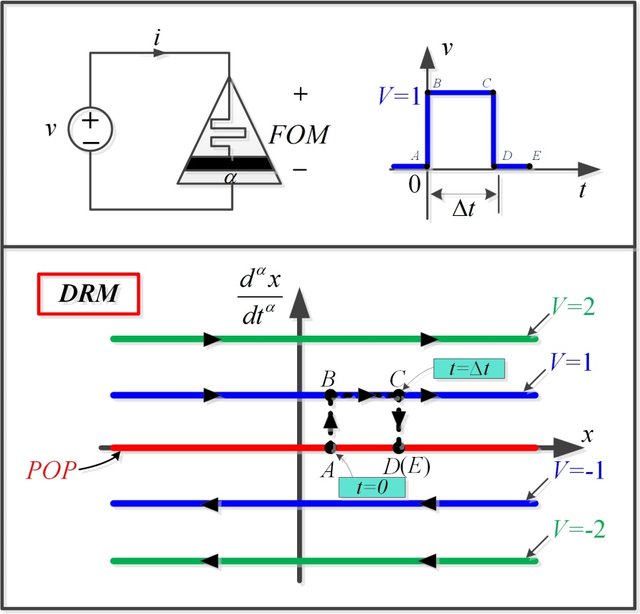
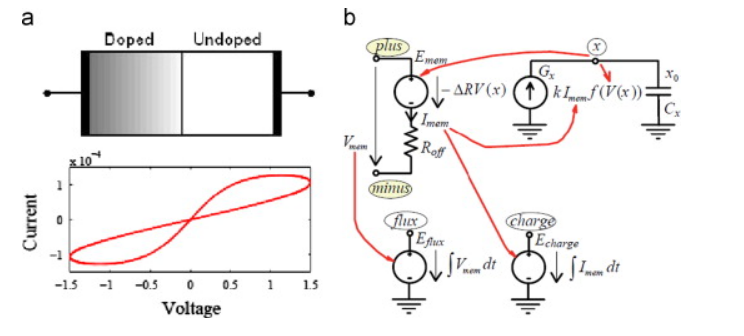
Multiple Pinch-Off Points in Memristive Equations: Analysis and Experiments
Pinched hysteresis behavior is considered evidence of the existence of the memristive element. Recently, the multi-lobes (more than two) behavior has been discovered in some memristive devices. In this paper, a fractional-order flux/voltage-controlled memristive model is introduced that is able to develop multiple symmetric and asymmetric pinch-off points. Generalized closed-form expressions for the necessary conditions of multiple pinch-off points existence are derived in addition to the coordinates of the pinch-off points in the I-V plane. Closed-form expressions for the minimum and maximum
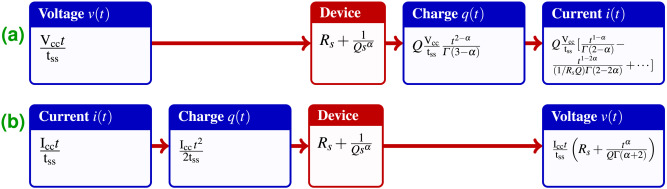
Supercapacitor reciprocity and response to linear current and voltage ramps
The focus in supercapacitor research typically falls into one of two categories: (i) the rational design and engineering of electrode materials and electrolyte formulation to achieve high performance devices at competitive costs, and (ii) the modeling of their resulting behavior in response to constant-current charging/discharging, cyclic voltammetry or impedance spectroscopy. However, less work has been dedicated to new ways for charging these devices. In this work we show that charging a supercapacitor, modeled as a constant phase element with a series resistor, using a linear voltage ramp
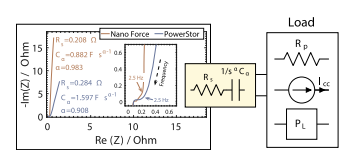
Supercapacitor discharge under constant resistance, constant current and constant power loads
Supercapacitors, which are now widely used as power sources in various applications, are discharged with one of the following three basic discharge modes: a constant current load, a constant resistance load or a constant power load. A constant current load is one which varies its internal resistance to achieve a constant current regardless of the applied voltage. For the constant resistance case, it results in a change of power as the voltage level changes. And for a constant power load, the load varies its impedance as the input voltage changes in order to keep the power constant. However
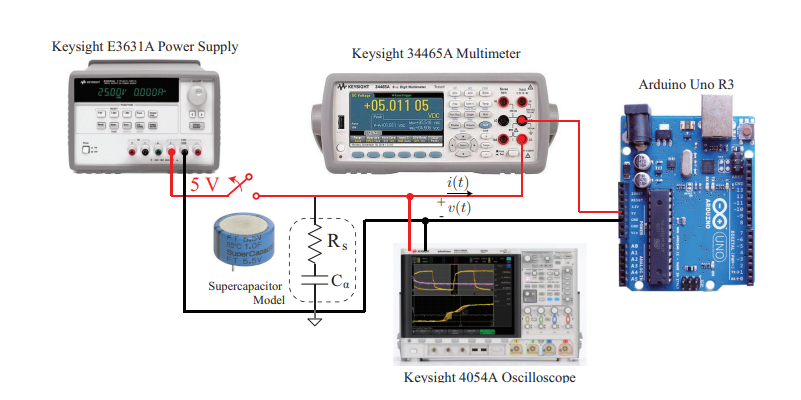
Supercapacitor Fractional-Order Model Discharging from Polynomial Time-Varying Currents
Fractional-order models of supercapacitors are advantageous in that they have fewer terms, offering simpler expressions to accurately describe the transient characteristics of these devices than integer-order models. When evaluating the discharge characteristics of supercapacitors, a constant current is often considered which does necessarily represent real-world applications. In this work, the voltage discharging expressions of a fractional-order model of a supercapacitor to time-varying polynomial discharging currents are presented using simulations to highlight the different cases. In
New hybrid synchronisation schemes based on coexistence of various types of synchronisation between master-slave hyperchaotic systems
In this paper, we present new approaches to study the co-existence of some types of synchronisation between hyperchaotic dynamical systems. The paper first analyses, based on stability theory of linear continuous-Time systems, the co-existence of the projective synchronisation (PS), the function projective synchronisation (FPS), the full state hybrid function projective synchronisation (FSHFPS) and the generalised synchronisation (GS) between general master and slave hyperchaotic systems. Successively, using Lyapunov stability theory, the coexistence of three different synchronisation types is
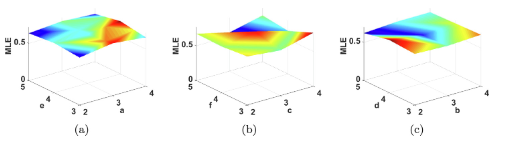
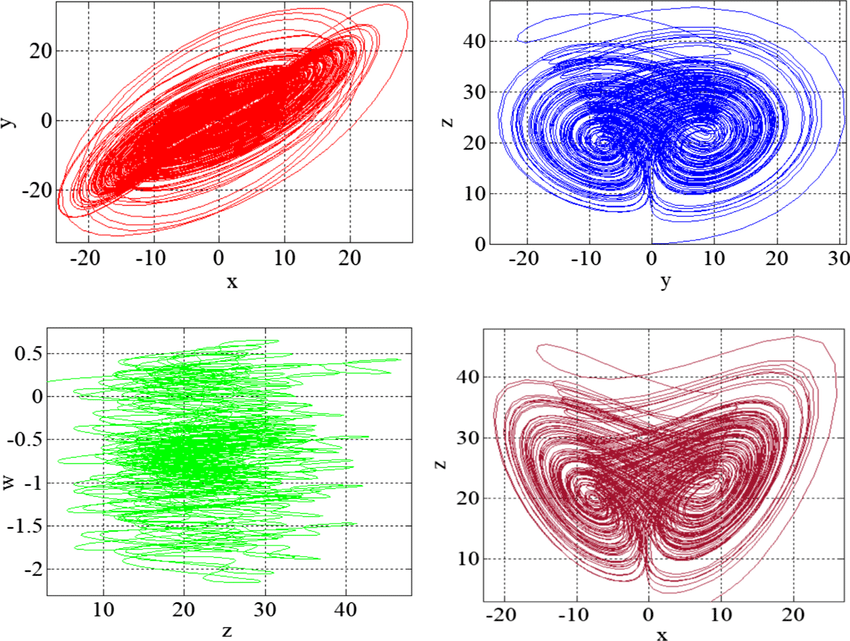
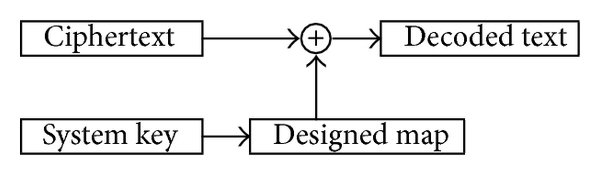
Trajectory control and image encryption using affine transformation of lorenz system
This paper presents a generalization of chaotic systems using two-dimensional affine transformations with six introduced parameters to achieve scaling, reflection, rotation, translation and/or shearing. Hence, the location of the strange attractor in space can be controlled without changing its chaotic dynamics. In addition, the embedded parameters enhance the randomness and sensitivity of the system and control its response. This approach overpasses performing the transformations as post-processing stages by applying them on the resulting time series. Trajectory control through dynamic
Design of Positive, Negative, and Alternating Sign Generalized Logistic Maps
The discrete logistic map is one of the most famous discrete chaotic maps which has widely spread applications. This paper investigates a set of four generalized logistic maps where the conventional map is a special case. The proposed maps have extra degrees of freedom which provide different chaotic characteristics and increase the design flexibility required for many applications such as quantitative financial modeling. Based on the maximum chaotic range of the output, the proposed maps can be classified as positive logistic map, mostly positive logistic map, negative logistic map, and
Improved memristor-based relaxation oscillator
This paper presents an improved memristor-based relaxation oscillator which offers higher frequency and wider tunning range than the existing reactance-less oscillators. It also has the capability of operating on two positive supplies or alternatively a positive and negative supply. Furthermore, it has the advantage that it can be fully integrated on-chip providing an area-efficient solution. On the other hand, The oscillation concept is discussed then a complete mathematical analysis of the proposed oscillator is introduced. Furthermore, the power consumption of the new relaxation circuit is
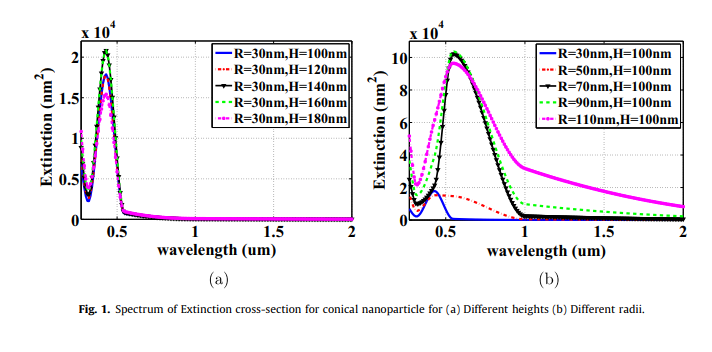
J-V characteristics of plasmonic photovoltaics with embedded conical and cylindrical metallic nanoparticles
Plasmonic photovoltaics (PVs) are promising structures that improve thin-film photovoltaics performance, where optical absorption is improved via embedding metallic nanoparticles in the PV's active layer to trap the incident optical wave into the photovoltaic cell. The presented work investigates the design of PV with both structures of conical and cylindrical metallic nanoparticles through studying their extinction cross-sections and electric field distributions. Also, the impact of these nanoparticles in silicon PVs on the optical absorption enhancement is investigated. The figure of merit
Design of fopid controller for a dc motor using approximation techniques
This paper introduces a study of fractional-order PID (FOPID) controller applied to a DC motor. The idea is to control the motor speed using the FOPID and compare it with the conventional PID controller. Two approximation techniques are employed to realize the FOPID, which are Matsuda and Oustaloup, each with order four. Different responses are depicted for various fractional orders. A specific case study for controlling the speed of a DC motor is investigated with selected fractional-orders. A comparison between the two applied techniques is proposed on the case study to determine which