
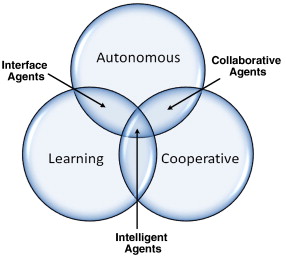
Agent-based simulation of urban infrastructure asset management activities
This paper presents a case for adopting agent-based modeling (ABM) as a framework for representing the complex interactions that occur within the context of urban infrastructure management. A generic ABM is proposed with four key agents namely; assets, users, operators and politicians. For each agent a set of generic attributes, actions and behaviors are defined. A detailed behavioral model is adapted from the service quality domain to represent customer perceptions and actions related to infrastructure level of service. An illustrative example of 20 assets and 50 user agents is simulated to
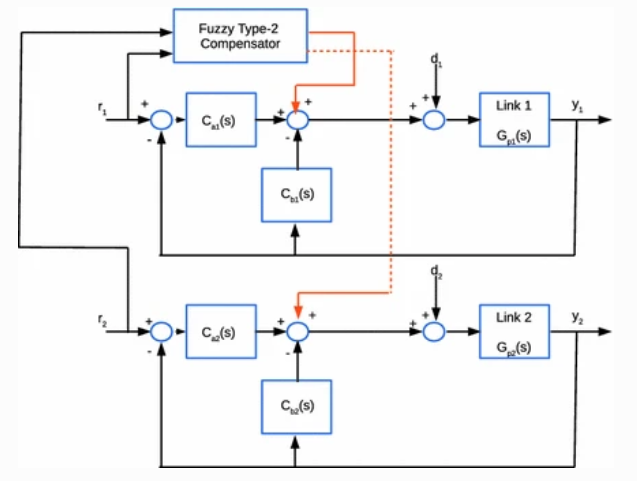
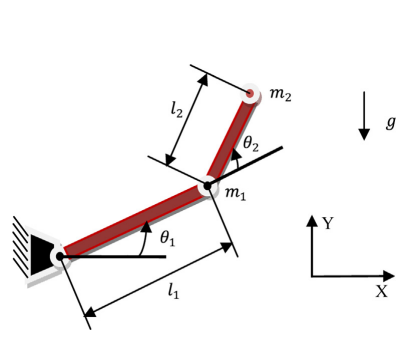
Fractional Order Two Degree of Freedom PID Controller for a Robotic Manipulator with a Fuzzy Type-2 Compensator
In this paper a novel strategy for the position control and trajectory tracking of robotic manipulators is proposed. This strategy consists of an independent two degree of freedom PID controller for a two links robotic arm. Due to the capability of two degree of freedom PID controllers to deal with disturbances, each link is controlled independently considering that the disturbance does not affect the system performance due to the robustness of the closed loop system. Then, a fuzzy type-2 centralized compensator is implemented to drive the orientation variables with the desired trajectory in
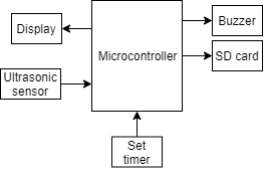
Simulation of vitiligo therapy equipment
Vitiligo is a skin disorder caused by a lack of melanin pigment in the skin, which causes white patches on certain parts of the skin because this melanin pigment is not able to produce the skin color. Previously, one of the treatments for vitiligo was using a UVB lamp with a 311 nm wavelength that could not yet be adjusted to dim the lights as safety when conducting therapy. Therefore, the research aims to design a simulation of the vitiligo therapy device equipped with a timer LED lamp, a safety of lighting, and the data storage. The data are stored in the SD Card to make it easier for
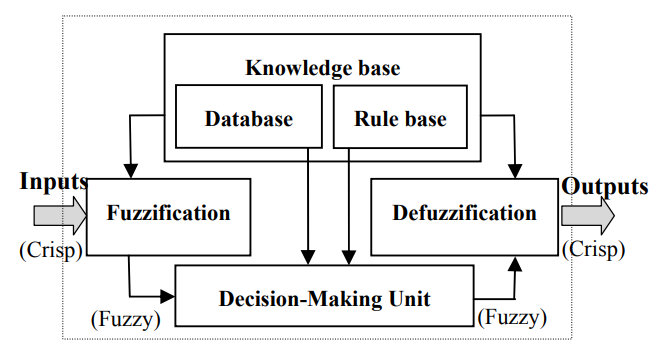
Conceptual cost estimation of pump stations projects using fuzzy clustering
Conceptual cost estimates, are prepared at the very early stages of a project, and generally before the construction drawings and specifications are available. At this stage, cost estimates are needed by the owner, contractor, designer, or funding agencies for determination of the feasibility of a project, financial evaluation of a number of alternative projects, or establishment of an initial budget. Traditional approaches rely heavily on experienced engineers. This paper presents a method using fuzzy clustering technique for pump station projects cost estimation. The proposed conceptual cost
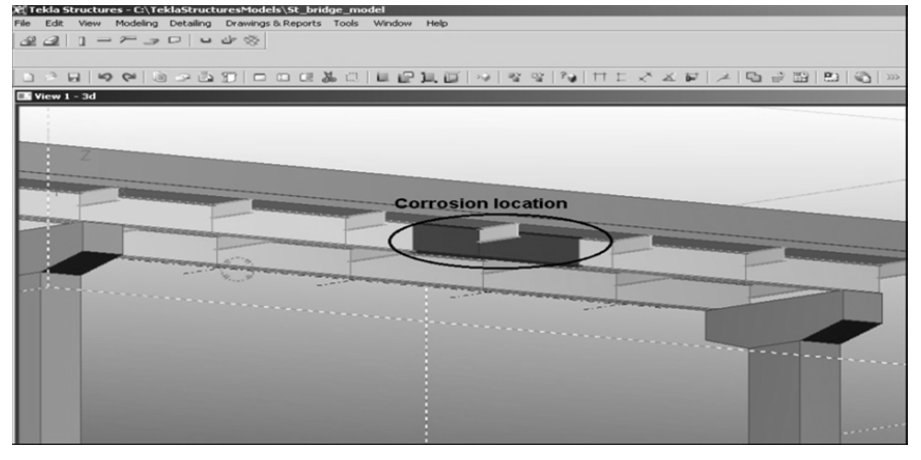
Bridge information modeling in sustainable bridge management
Bridge Management Systems (BMS) play a crucial role in maintenance and rehabilitation decisions related to bridges. This paper presents using Bridge Information Modeling (BrIM) framework that adopts BMS features including; databases, inspection module, and condition assessment module. The proposed BrIM framework creates a database of bridges' components and generates inspection spreadsheets. It also visualizes bridge components considering the information stored in the database and inspection spreadsheets, using Structured Query Language (SQL) statements. The paper presents the integration of
Design of fractional order fuzzy sliding mode controller for nonlinear complex systems
Controlling a nonlinear, time-varying, uncertain, coupled multiinput-multioutput (MIMO) complex system is always a challenging task for control engineers. A linear PID controller is not able to control effectively these complex systems and a robust adaptive controller is needed for perfect control. In this chapter, a fractional order fuzzy sliding mode proportional derivative (FOFSMCPD) controller is presented to control a two-link planar rigid robotic manipulator system. Literature reveals that sliding mode controllers (SMC) have the serious issue of fast oscillations, called chattering, in
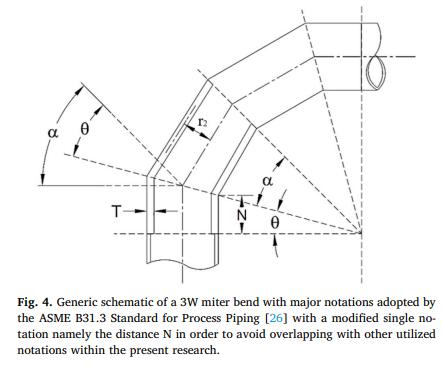
Load carrying capacities of pressurized 90 degree miter and smooth bends subjected to monotonic in-plane and out-of-plane bending loadings
The present research focuses on generating interaction diagrams (i.e. limit moment boundaries vs steady internal pressure spectra) of pressurized 90 o miter and smooth bends. One-, two-, three-, and four-weld miter bends are modelled and analyzed. Additionally, 90 o smooth bends (SBs) bearing the miter bends’ same material and major geometric parameters are analyzed thus providing broader range of comparisons concerning structural responses to external applied loadings. All bends analyzed are subjected to steady internal pressure spectra and monotonic in-plane closing, in-plane opening, and
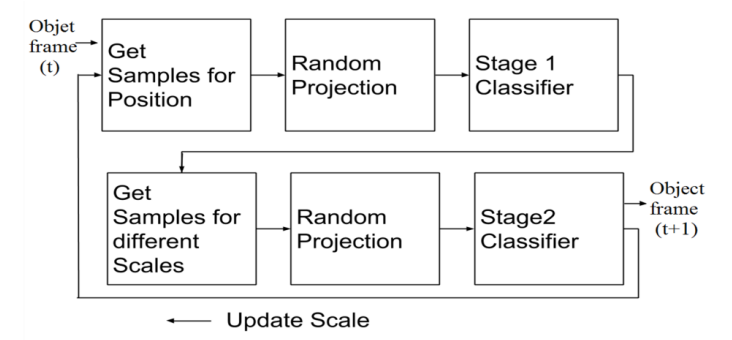
Real-time scale-adaptive compressive tracking using two classification stages
In this paper, we describe a method for Scale-Adaptive visual tracking using compressive sensing. Instead of using scale-invariant-features to estimate the object size every few frames, we use the compressed features at different scale then perform a second stage of classification to detect the best-fit scale. We describe the proposed mechanism of how we implement the Bayesian Classifier used in the algorithm and how to tune the classifier to address the scaling problem and the method of selecting the positive training samples and negative training samples of different scales. The obtained
Innovative human-robot interaction for a robot tutor in biology game
Robots nowadays, are introduced to many domains and fields. One of these fields is education. We introduce integrating robots and games in education. We have designed a humanoid robot tutoring biology. Our robot is interacting with a student to play a game to enhance and examine the student's knowledge. In our game, we developed cognitive capabilities for the robot. We analyzed the features that both the robot and the game have to possess, and we developed a system for organ detection and recognition with the highest possible accuracy and lowest processing time. Our game introduces a multi

Validation of the Nonlinear Superposition Method (NSM) for elastic shakedown limit pressures via comparison with experimental test results of spherical vessels with radial and oblique nozzles
The present research revisits rare experiments which determined elastic shakedown (SD) limit pressures of full scale radial and oblique nozzles partially penetrating spherical vessels. The experiments were conducted at Berkeley Nuclear Laboratories in England [1]. The SD limit pressures were determined via conducting consecutive series of internal pressure cycles and observing cyclic strain variation recorded by strain gauges cemented at predetermined various critical locations within the junctions’ vicinities. The Nonlinear Superposition Method (NSM), formulated for computing elastic SD limit