
IoT Modes of Operations with Different Security Key Management Techniques: A Survey
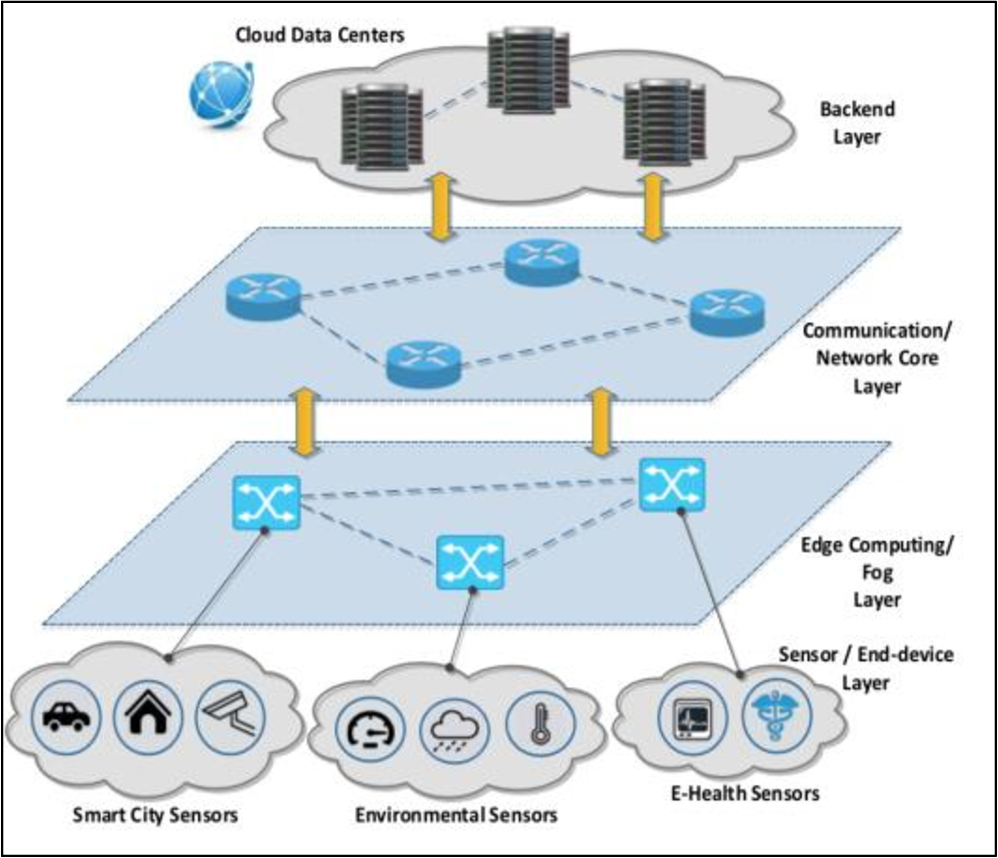
The internet of things (IoT) has provided a promising opportunity to build powerful systems and applications. Security is the main concern in IoT applications due to the privacy of exchanged data using limited resources of IoT devices (sensors/actuators). In this paper, we present a classification of IoT modes of operation based on the distribution of IoT devices, connectivity to the internet, and the typical field of application. It has been found that the majority of IoT services can be classified into one of four IoT modes: Gateway, device to device, collaborative, and centralized. The
Gesture recognition for improved user experience in augmented biology lab
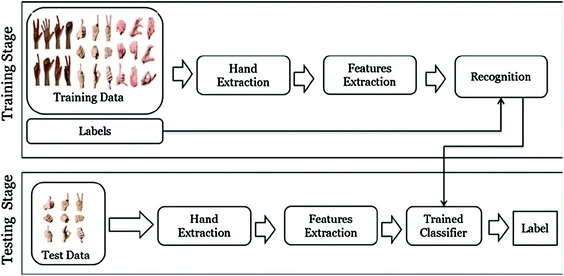
The Learning process in education systems is one of the most important issues that affect all societies. Advances in technology have influenced how people communicate and learn. Gaming Techniques (GT) and Augmented Reality (AR) technologies provide new opportunities for a learning process. They transform the student’s role from passive to active in the learning process. It can provide a realistic, authentic, engaging and interesting learning environment. Hand Gesture Recognition (HGR) is a major driver in the field of Augmented Reality (AR). In this paper, we propose an initiative Augmented
Motion and depth augmented semantic segmentation for autonomous navigation
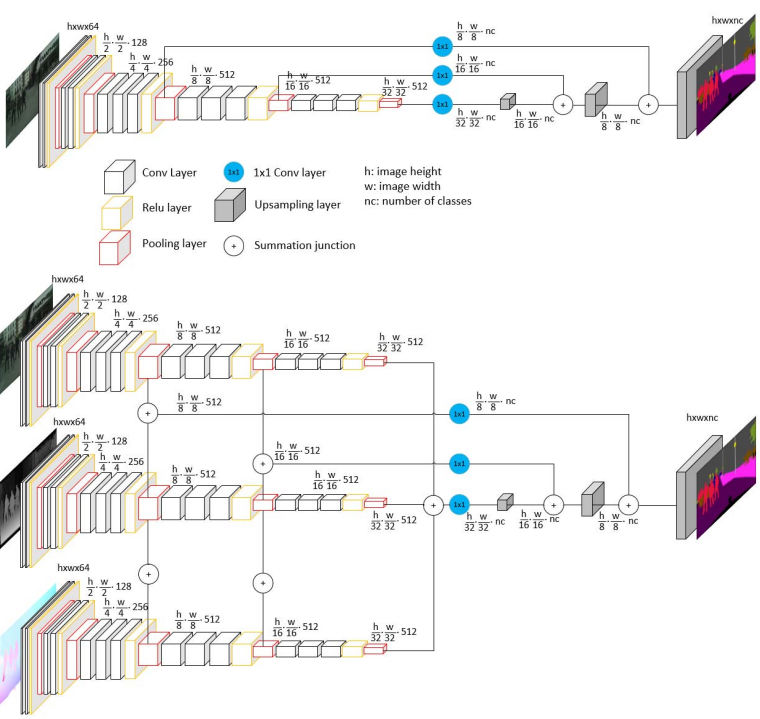
Motion and depth provide critical information in autonomous driving and they are commonly used for generic object detection. In this paper, we leverage them for improving semantic segmentation. Depth cues can be useful for detecting road as it lies below the horizon line. There is also a strong structural similarity for different instances of different objects including buildings and trees. Motion cues are useful as the scene is highly dynamic with moving objects including vehicles and pedestrians. This work utilizes geometric information modelled by depth maps and motion cues represented by
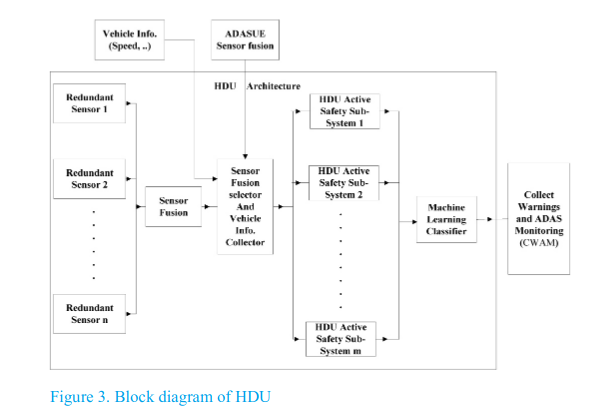
Remote Diagnosis, Maintenance and Prognosis for Advanced Driver Assistance Systems Using Machine Learning Algorithms
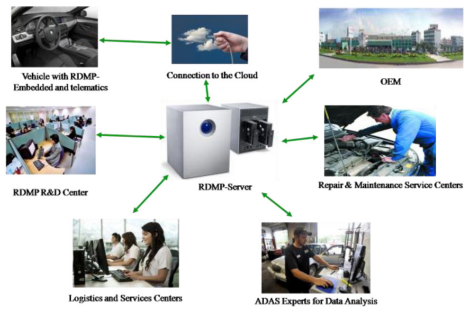
New challenges and complexities are continuously increasing in advanced driver assistance systems (ADAS) development (e.g. active safety, driver assistant and autonomous vehicle systems). Therefore, the health management of ADAS’ components needs special improvements. Since software contribution in ADAS’ development is increasing significantly, remote diagnosis and maintenance for ADAS become more important. Furthermore, it is highly recommended to predict the remaining useful life (RUL) for the prognosis of ADAS’ safety critical components; e.g. (Ultrasonic, Cameras, Radar, LIDAR). This paper
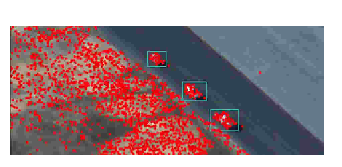
Tracking ground targets from a UAV using new P-N constraints
This paper presents improved automatic moving target detection and tracking framework that is suitable for UAV imagery. The framework is comprised of motion compensation phase to detect moving targets from a moving camera, target state estimation with Kalman filter, and overlap-rate-based data association. Finally, P-N learning is used to maintain target appearance by utilizing novel structural constraints to select positive and negative samples, where data association decisions are used as positive (P) constraints. After learning target appearance, a cascaded classifier is employed to detect
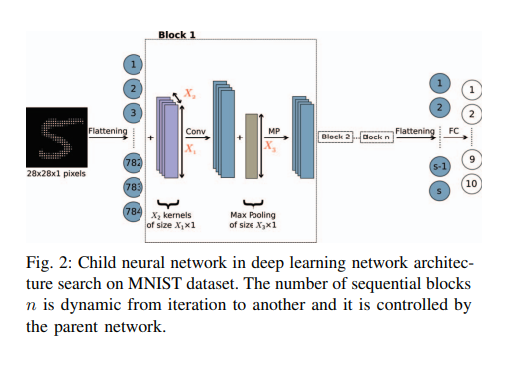
AutoDLCon: An Approach for Controlling the Automated Tuning for Deep Learning Networks
Neural networks have become the main building block on revolutionizing the field of artificial intelligence aided applications. With the wide availability of data and the increasing capacity of computing resources, they triggered a new era of state-of-the-art results in diverse directions. However, building neural network models is domain-specific, and figuring out the best architecture and hyper-parameters in each problem is still an art. In practice, it is a highly iterative process that is very time-consuming, requires substantial computing resources, and needs deep knowledge and solid
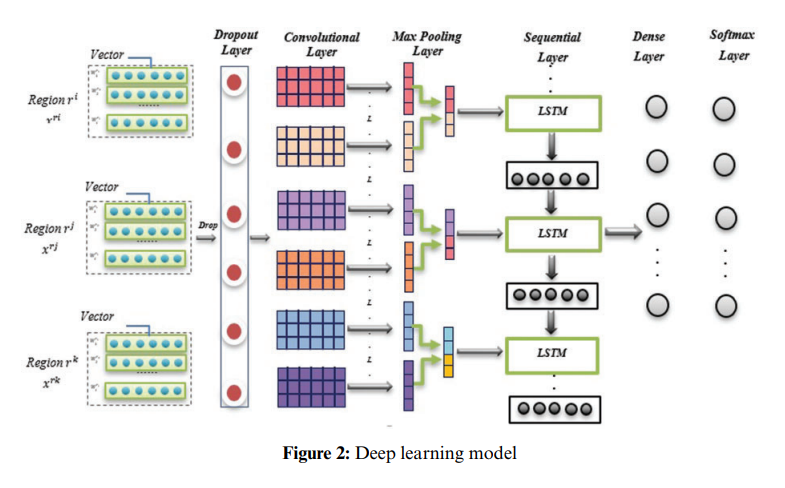
Arabic fake news detection using deep learning
Nowadays, an unprecedented number of users interact through social media platforms and generate a massive amount of content due to the explosion of online communication. However, because user-generated content is unregulated, it may contain offensive content such as fake news, insults, and harassment phrases. The identification of fake news and rumors and their dissemination on social media has become a critical requirement. They have adverse effects on users, businesses, enterprises, and even political regimes and governments. State of the art has tackled the English language for news and
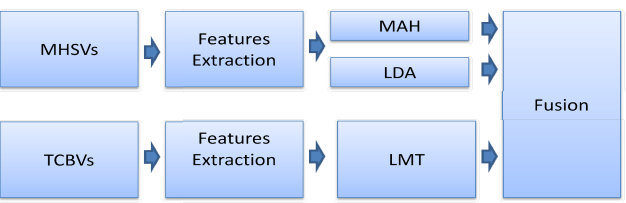
Motion history of skeletal volumes and temporal change in bounding volume fusion for human action recognition
Human action recognition is an important area of research in computer vision. Its applications include surveillance systems, patient monitoring, human-computer interaction, just to name a few. Numerous techniques have been developed to solve this problem in 2D and 3D spaces. However 3D imaging gained a lot of interest nowadays. In this paper we propose a novel view-independent action recognition algorithm based on fusion between a global feature and a graph based feature. We used the motion history of skeleton volumes; we compute a skeleton for each volume and a motion history for each action
On Board Evaluation System for Advanced Driver Assistance Systems
The evaluation of Advanced Driver Assistance Systems (ADAS including driver assistance and active safety) has increasing interest from authorities, industry and academia. AsPeCSS active safety project concludes that good results in a laboratory test for active safety system design does not necessarily equate to an effective system in real traffic conditions. Moreover, many ADAS assessment projects and standards require physical testing on test tracks (dummy vehicles, pedestrian mannequins.), which are expensive and limit testing capabilities. This research presents a conceptual framework for
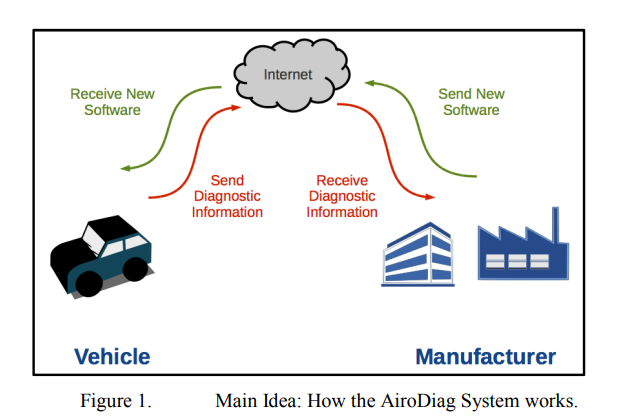
AiroDiag: A sophisticated tool that diagnoses and updates vehicles software over air
This paper introduces a novel method for diagnosing embedded systems and updating embedded software installed on the electronics control units of vehicles through the Internet using client and server units. It also presents the communication protocols between the vehicle and the manufacturer for instant fault diagnosis and software update while ensuring security for both parties. AiroDiag ensures maximum vehicle efficiency for the driver and provides the manufacturer with up-to-date vehicle performance data, allowing enhanced future software deployment and minimum loss in case of vehicle