Tactile sensing biohybrid soft E-skin based on bioimpedance using aloe vera pulp tissues
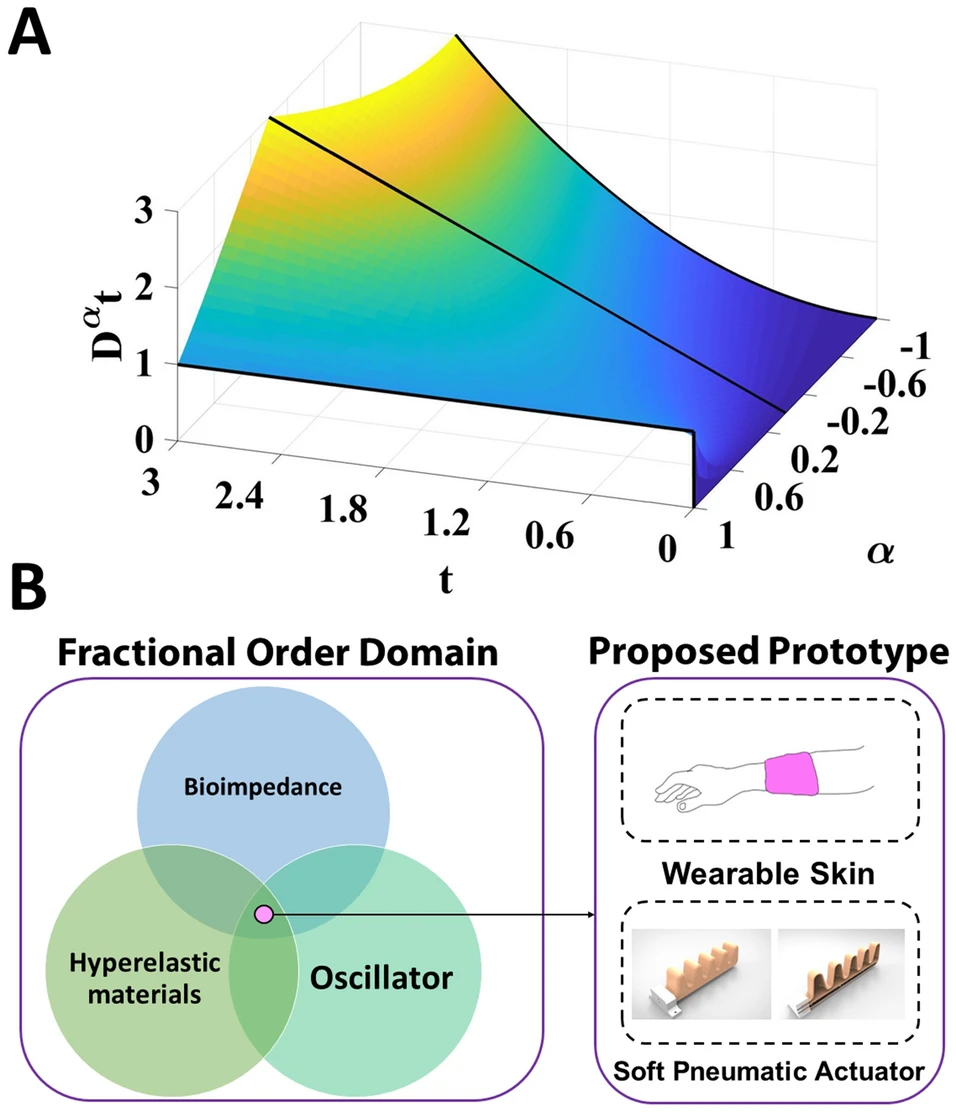
Soft and flexible E-skin advances are a subset of soft robotics field where the soft morphology of human skin is mimicked. The number of prototypes that conformed the use of biological tissues within the structure of soft robots—to develop “Biohybrid Soft Robots”—has increased in the last decade. However, no research was conducted to realize Biohybrid E-skin. In this paper, a novel biohybrid E-skin that provides tactile sensing is developed. The biohybrid E-skin highly mimics the human skin softness and morphology and can sense forces as low as 0.01 newton. The tactile sensing feature is augmented through the use of Aloe Vera pulp, embedded in underlying channel, where the change in its bioimpedance is related to the amount of force exerted on the E-skin surface. The biohybrid E-skin employs high biomimicry as the sensorial output is an oscillating signal similar to signals sent from the human sensing neurons to the brain. After investigating different channel geometries, types of filling tissues, and usage of two silicone materials, their frequency-force behaviour is modelled mathematically. Finally, a functional multichannel prototype “ImpEdded Skin” is developed. This prototype could efficiently detect the position of a tactile touch. This work employs the development of discrete sensing system that exhibits morphological computation that consequently enhances performance. © 2021, The Author(s).